Das Zurückstellen der Flap Retract Speed war heute das primäre Anliegen. Anschließend sind Ely und ich zur Walhalla geflogen und über Straubing wieder zurück.
Kategorie: Avionic
2025-12-03 AMP, Voltage and Heading Tests, Dynon Update 17.4
Heute habe ich das Dynon Update 17.4 geladen. Anschließend habe ich versucht, nach der Deselection von ADAHRS 201 die Fehlermeldung „NEED USER AOA CAL“ zu provozieren. Diese Meldung ist jetzt nicht mehr erschienen. Das Update hat wohl hier einen Bug behoben.
Einen Rolltest habe ich auch noch durchgeführt um die Qualität der Heading Anzeige zu überprüfen. Es ist wohl so, dass bei 244° nur 240° und bei 64° nur 62° angezeigt werden. Ich habe dann den um 25° falsch angezeigten Heading nach dem Einbau ds Tsi-Fahrwerks jetzt mit dem neuen Fahrwerk in Verbindung gebracht und nicht mehr als einen Defekt der ADAHRSe. Mails mit Dynon und TAF habe dies weitestgehend bestätigt. Die empfohlene Einbauposition der Garmin GMU bei der TSi ist bei Rib 5 etwa in mittiger Höhe. Diese Position ist um einiges weiter vom Fahrwerk entfernt als die ursprünglich empfohlene Einbauposition hinter Rib 4 am Boden für die Sling 2. Den Gedanken, ein zusätzliches Dynon SV-MAG-236 an der neuen Position einzubauen, habe ich verworfen. Der MAG würde zusätzliche 350g wiegen. Beide ADAHRSe wiegen zusammen mit dem Verbindungs-Bracket 450g. Ich werde mir ein Bracket bauen und die ADAHRSe an Rib 5 verschieben.
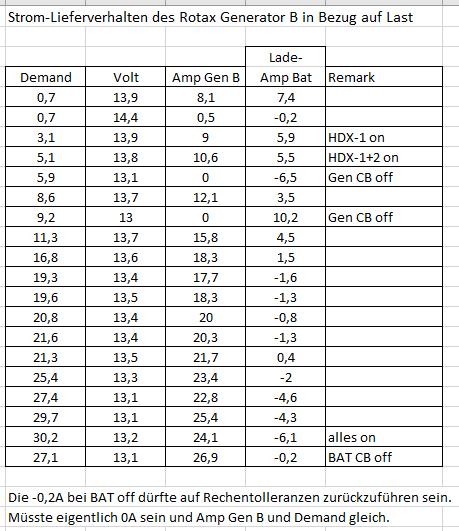
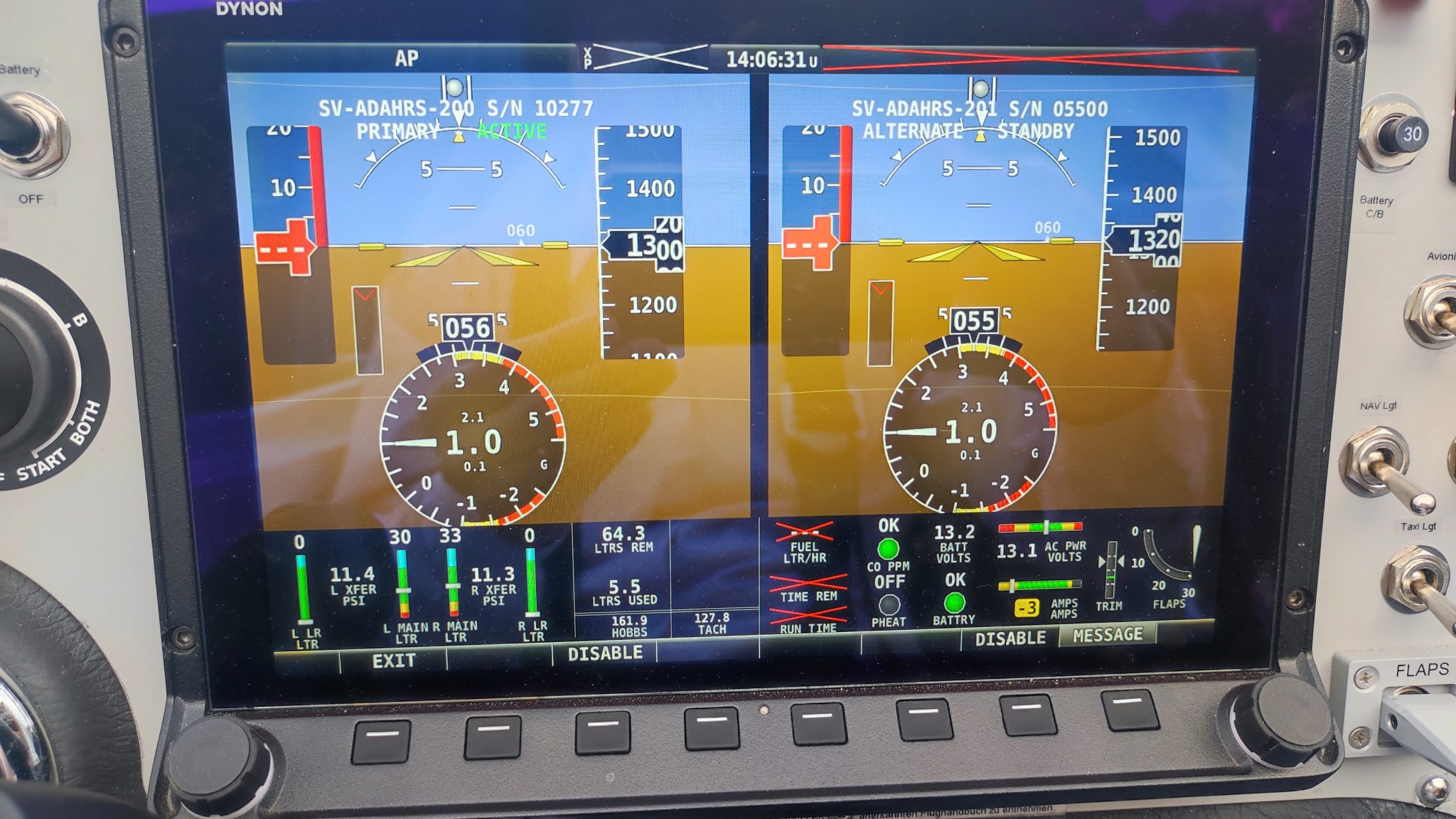
Nachdem ich wieder festgestellt habe, dass bei höherem Amp Demand die Voltage auf unter 13,5 sinkt und dann die Batterie zur Stromversorgung beiträgt, statt weiter geladen zu werden, wollte ich herausfinden, ab welchem Amp-Wert das eintritt. Ich habe dazu alle Verbraucher über das V-PX Menp ausgeschaltet, einschließlich der HDXe, die jetzt von ihrer Backup Bat versorgt wurden. In diesem Zustand lieferte der Generator 14,4 V. Wenn nun Verbraucher zugeschaltet werden und sich ein Demand von über 21 A einstellt, sinkt die Spannung auf unter 13,5 V und ab diesem Zeitpunkt liefert die Batterie Strom ans Bordnetz, statt weiter geladen zu werden. Dies, obwohl der Generator 30 A liefern können müsste. Ich werde hierzu wohl mit Rotax nochmals reden müssen. Möglicherweise gibt es mittlerweile einen an Lithium Batterien angepassten Regulator, nachdem Rotax jetzt selbst die EarthX im Programm führt.
2025-10-29 155. Flug – AOA und Compass Calibration
Heute war phantastisches Flugwetter. Somit habe ich die AOA Calibration gleich geflogen, genauso wie die Compass Calibration. Diesmal habe ich die Quality Werte von 109 erreicht. 10 Kreispaare bin ich geflogen.


2025-10-25 Ölleitung verbessert, Auspuff befestigt, Cowling montiert, 154. Flug – OB Data von EasyVFR o.k.
Bei der Suche nach Stellen, die beim Motorträger ausgebessert werden müssen, ist mir eine Scheuerstelle der Ölleitung mit dem Engine Frame aufgefallen. Durch eine Verbindung der beiden Leitungen ist das Scheuern jetzt unterbunden.

Weiter ist mir aufgefallen, dass die Befestigung des Auspuffendrohrs mit Sicherungsdraht gebrochen war. Die jetzige Befestigung ist flexibel und deutlich stabiler.

Nachdem ich die Cowling wieder montiert hatte, wollte ich auch noch überprüfen, ob das Problem mit der Synthetic Vision jetzt mit der neuen OB-Datei von EasyVFR behoben ist. Es war zwar ein recht windiger Tag. Aber nachdem die Startbahn jetzt ganz akkurat am Display angezeigt wurde, hat mich das so begeistert, dass ich eine Platzrunde geflogen bin. Nach dem Abheben war ich mir gar nicht mehr so sicher, ob das eine gute Idee war. Denn es war extrem bockig. Entsprechend anspruchsvoll ist auch der Anflug geworden. Deshalb habe ich kein Foto vom Display in dieser Flugphase machen können. Mit der Landung war ich dann aber doch zufrieden, ohne durchstarten zu müssen. Somit ist das Avionic Problem endlich erledigt. Der Grund lag laut EasyVFR an den Höhendaten der Thresholds, die seit der Umstellung der Bahnen 07/25 auf 06/24 Anfang April das Problem verursachten. Mir ist vorher leider nicht aufgefallen, dass in Rotenburg die Bahn richtig dargestellt wurde und vermutete zuerst das Dynon Update, weil ich die Bahn von EDML letztmalig im März richtig dargestellt gesehen hatte. Zwischenzeitlich machte ich ja all die Updates. Erst der Zufall, weil ich die Videos der Schallpegelmessung nochmals angesehen hatte, hat die Erkenntnis gebracht, dass es nicht am Dynon Update gelegen haben kann, denn sonst wäre Rotenburg auch falsch bzw. gar nicht dargestellt gewesen. Aber, wie gesagt, jetzt ist wieder alles o.k. und ich kann bei EasyVFR bleiben.
Ich habe bis heute keine schlüssige Erklärung dafür, warum mir der Heading um 25° falsch angezeigt wurde. Die Compass-Flight-Calibration am 07.09.2025 hatte dies wieder in Ordnung gebracht. Mir ist jetzt aber noch eine Änderung eingefallen, die diese Erscheinung verursacht haben könnte. Ich habe die Original-Gurte von TAF mit Gadringer Gurten getauscht. Die Gadringer Gurte haben Beschläge aus Eisen, die jetzt in der Nähe der Magnetometer (ADAHRSe) an der Gepäckrückwand montiert sind. Diese habe ich heute mit den Beschlägen von TAF aus Aluminium getauscht. Eine erneute Compass-Flight-Calibration könnte jetzt die Anzeige weiter verbessern.

2025-10-17 153. Flug – AV und OB Database von Airmate Test
Don Jones hat mir zum Test Aviation und Obstacle Database Files von Airmate gemailed. Nachdem ich herausgefunden habe, dass im März das letzte Mal eine korrekte Anzeige der Synthetic Vision (Terrain) stattgefunden hat, habe ich zuerst die März Dateien von EasyVFR nochmals geladen. Leider konnte ich die Runway nicht dadurch zur Darstellung an der richtigen Position bringen. Daraufhin habe ich die Airmate Dateien geladen. Und, hurra, die Bahn ist da! Zuerst nur quer vor mir, weil ich am Holdingpoint 06 geparkt hatte. Jetzt dachte ich, es könnte dadurch eine Art Reset stattgefunden haben und lud der Reihe nach von Januar bis Oktober alle EasyVFR Datafiles. Kein einziger hat die Runway dargestellt. Auch nicht der Satz vom März. Daraufhin habe ich wieder die Airmate Dateien geladen und die Runway war wieder da. Danach bin ich auf die Bahn 24 gerollt und hatte ein perfektes Bild. Das ist doch ein Erfolg. Ich habe eine Platzruunde gedreht. Von der Position kurz vor dem Aufsetzen bei der Landung habe ich leider kein Bild mehr gemacht. Was jetzt EasyVFR zu dieser Situation sagen wird, ist unklar. Ich bin neugierig.


2025-10-15 152. Flug – Dynon Diagnostic
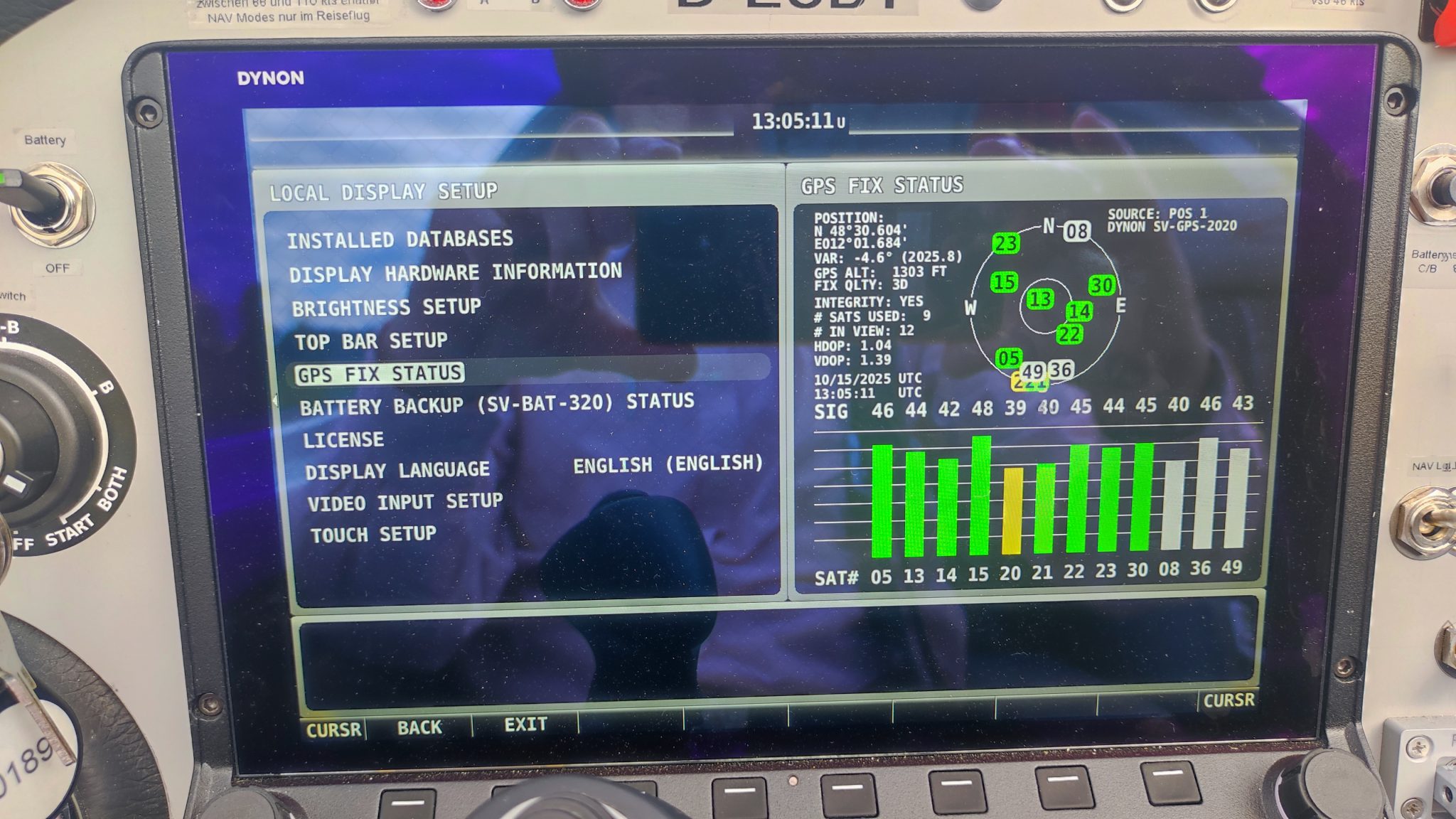
Don Jones von Dynon Support hat mir eine Anweisung geschrieben, wie ich den für die weitere Analyse benötigten Diagnostic File lade und welche Fotos ich zusätzlich machen und mitschicken sollte. Zuerst habe ich das Setup Menu LOCAL DISPLAY SETUP > DISPLAY GPS FIX STATUS
geöffnet als ich in der Holding Position RWY 06 stand um zu sehen, was es überhaupt zu fotografieren gibt. Dann bin ich Startposition gerollt und habe folgende Fotos gemacht:

Danach bin ich zurückgerollt in die Holding Position. Dort habe ich auf 17.3 upgedated und habe nach dem Aufrollen auf die Bahn wieder Fotos gemacht:


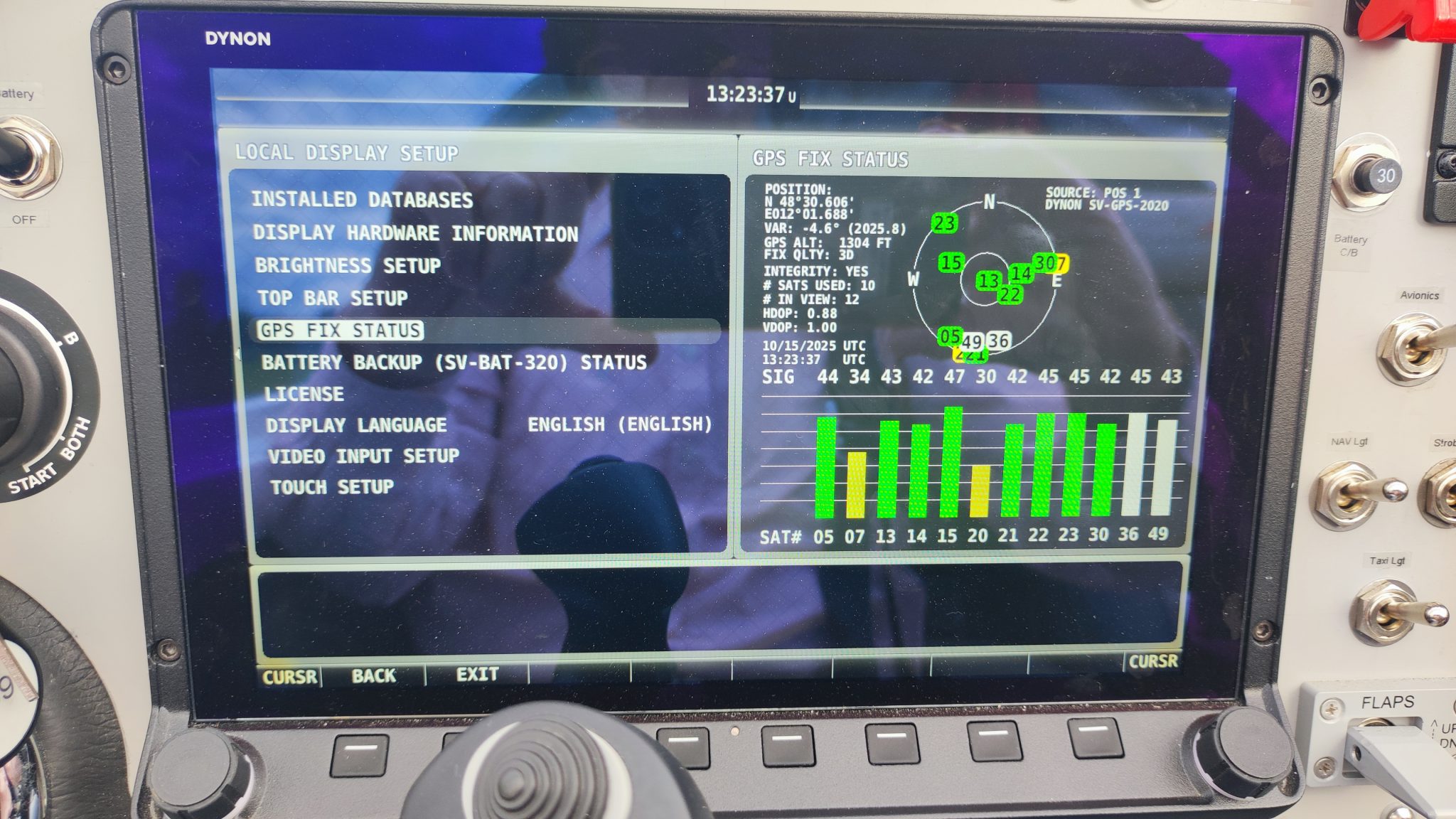
Nachdem in der Map das Flugzeugsymbol auf der Bahn steht, wie auch der physische Flieger, und noch keine Runway im Terrainfeld zu sehen ist, hat auch das Update auf 17.3 keine Änderung gebracht. Ich bin daraufhin geflogen und wollte ungefähr herausfinden, wo das Terrain die Runway den tatsächlich verortet. Ich habe einen Low Approach auf die 06 Gras gemacht und sah die Terrain Runway jetzt links. Man hätte glauben können, es stimmt jetzt.

Bei der anschließenden Landung auf der Asphalt 06 war die Terrain Runway aber wieder rechts und das Aufsetzten erfolgte im „Gras“.

Das sagt mir, dass die Terrain Runway wohl zwischen den beiden Bahnen zu liegen scheint. Ich habe daraufhin die Runway suchen wollen. Das heißt, ich bin die Grasbahn entlang gerollt und bin mit 30 bos 45 Grad auf die Runwayseite gerollt und hoffte, eine Runway auf dem Terrain Display zu bekommen. Leider erfolglos. Daraufhin habe ich noch einen 360 auf dr Grasbahn gedreht. Das blieb ebenfalls erfolglos. Die Grasbahn war recht uneben. Möglicherweise habe ich deshalb beim Vollkreis eine Heading Disagree Fehlermeldung erhalten. Jetzt weiß ich also auch, wie sich die gegenseitige Kontrolle der Komponenten auswirkt, wenn tatsächlich mal ein Mismatch gefunden wird und wie man das vermeintlich richtige System dann auswählt, beziehungsweise das vermutlich falsche disabled.

2025-09-28 142-143. Flug – Platzrunde nach Dynon Backdate auf 17.1
Don Jones hat mir debug files geschickt, mit denen ich das Backdate auf 17.1 durchführen konnte. Leider hat auch diese Aktion nicht zum Erfolg geführt. Aber wenigstens konnte ich wieder 2 Platzrunden fliegen. Ely hat es auch gefreut.
2025-09-26 Alte OB und AV Database geladen und Testgerollt
Den Anweisungen von Don Jones bin ich heute nachgekommen und habe die alten OB und AV Databases geladen, mit denen vor dem Update auf 17.3 die Anzeigen stimmten. Das Testrollen hat ergeben, dass mit dieser Database das Problem weiterhin besteht.
Bei späteren Analysen wurde klar, dass das Problem auch schon bei dieser Database-Version bestanden hat. Ich hatte es bis dahin nur noch nicht bemerkt. Ich müsste also eine Database von März laden. Am 22.03.2025 war die Darstellung der Runway nachweislich korrekt. Das habe ich aber erst heute, am 16.10.2025 erkannt.
2025-09-25 Backup Bat geladen, Ventilgewinde nachgearbeitet, Sensor erneuert, 141. Flug,
Als erstes habe ich die Backup Bat vom linken HDX geladen. Das Ladegerät als Stromlieferant liefert maximal 5 A. Ein HDX zieht 4,7 A. Deshalb musste ich das Laden der beiden Bats nacheinander machen um nicht wieder die Starterbatterie zu entladen. In der Zwischenzeit habe ich mich um die Schlauch-Ventile gekümmert. Den rechten HDX habe ich mit im VP-X Menü eingeschaltet und konnte dann den linken HDX mit seiner Taste ausschalten. So hatte ich wieder nur einen Strombedarf von knapp unter 5 A.
Die Information von Tost war, dass es kein anderes Gewinde sei. Deshalb habe ich es nachgearbeitet. Das Werkzeug dazu musste ich mir aber zuerst passend machen. Das Oberteil habe ich als 10 mm Sechskant gefeilt. Die Vorderen Klauen musste ich auch zusammenbiegen, um das Gewinde bearbeiten zu können. Letztlich ist es mir gelungen, die Sensoren auf beide Schlauchventile aufzuschrauben. Der neue Sensor musste zuerst eingebunden werden. Das ging auch nicht so einfach wie beschrieben. Bevor ich ihn mit „ersetzen“ einbinden konnte, musste ich den alten erst „disablen“. Dann ging das mit „ersetzen“. Ein Firmware Update ist mir nicht gelungen. Aber das sieht jetzt gut aus und ich konnte die Spats wieder montieren. Sollte ich beim notwendigen Reifenwechsel auf Schlauchlos umsteigen, machen die 60° Ventile eine gute Figur.



Bei der Analyse der Videos für die T/O-Performance ist mir aufgefallen, dass seit dem letzten Update der HDX Software auf 17.3, die Position der Terrain Darstellung nicht mehr stimmt. Obwohl ich auf der Bahn stand, wurde sie weiter südlich dargestellt. Ich landete sozusagen im Gras neben der Bahndarstellung. Allerdings habe ich die Obstacle Database nach dem Softwareupdate auch noch aktualisiert. So kommen 2 Ursachen in Frage. Ich habe den Dynon Support um Rat gefragt, weil ich das Software Update als Ursache ansah. Dynon schrieb mir zurück, dass es manchmal mit den Obstacle Databases Schwierigkeiten geben kann. Ich habe die aktuelle OB…dub von EasyVFR4 nochmals geladen. Um herauszufinden, ob sich etwas geändert hat, bin ich zum Vorfeld gerollt. Weil das Wetter so schön geworden ist, habe ich dann noch eine Platzrunde geflogen. Die versetzte Darstellung war aber immer noch so wie vorher. Zuhause angekommen las ich eine weitere Antwort von Dynon mit dem Vorschlag, die alte OB…dub nochmals zu laden um herauszufinden, ob das eine Änderung bringt. Mit dieser alten war die Anzeige ja korrekt. Das werde ich bei nächster Gelegenheit tun.
2025-09-20 Schläuche eingebaut, Ventilgewinde passt nicht, Dynon Backup Battery Test
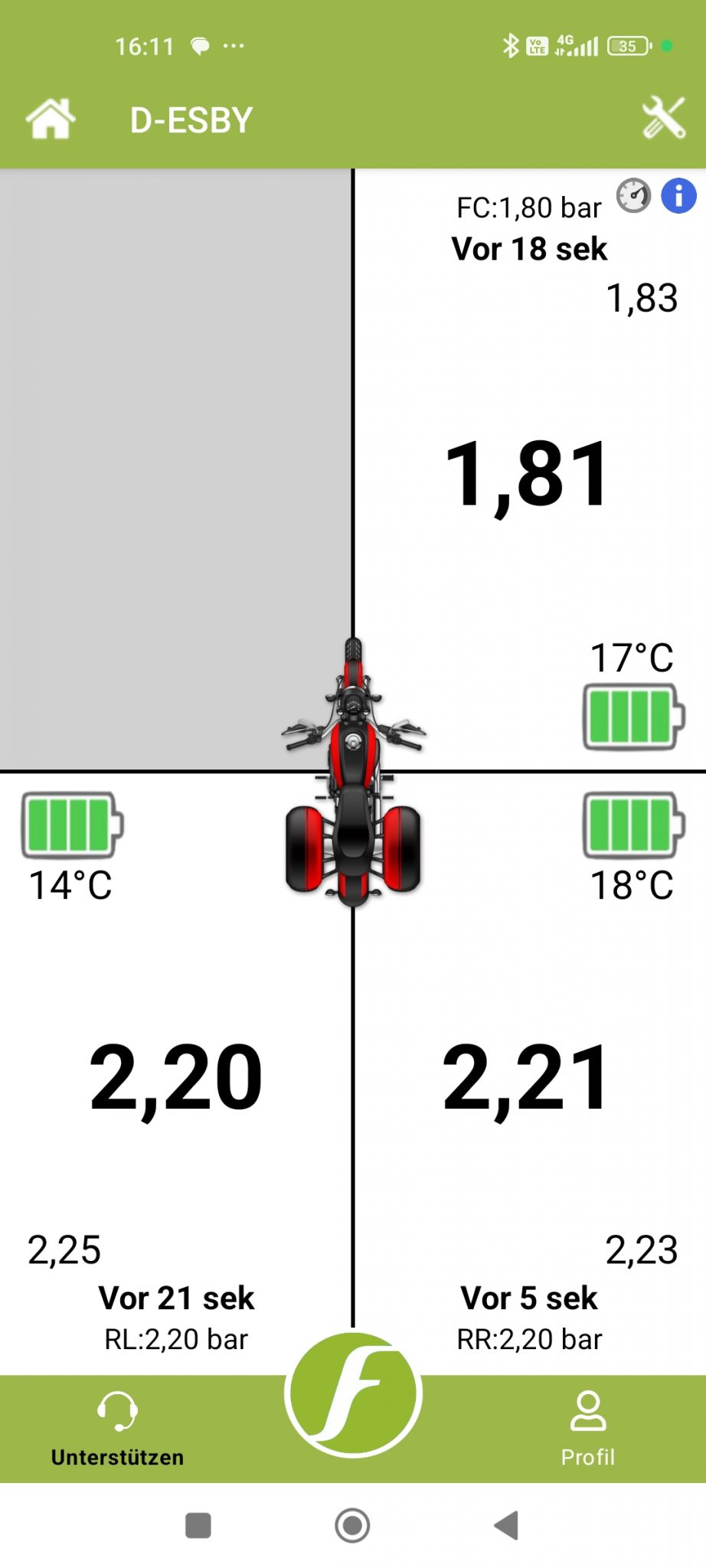
Das Einbauen des Schlauches war unkompliziert. Mit dem Gummiring hatte ich zuerst Probleme. Aber mit 2 Klammern ist es mir dann doch gelungen, die Felge zusammen zu schrauben, ohne den Gummiring und den Schlauch einzuklemmen. Dann ging es ans Auswuchten. Ich konnte mich daran erinnern, dass ich 2019 bei Polo eine zusätzliche Welle mit Kegeln bis 34 mm gekauft hatte, mit denen ich die Main Wheels auswuchten konnte. Leider konnte ich dieses Werkzeug nirgends mehr finden. Ich habe mir mit jeweils 3 Kabelbindern zusätzliche Dicke für die Nabe erzeugt. So konnte ich das Auswuchten bewerkstelligen. Schnell war das Rad an die Feder geschraubt. Der Sensor ist ja verloren gegangen. So habe ich eine normale Ventilkappe aufgeschraubt. Der Sensor ist ja schon bestellt und sollte am Montag geliefert werden.




Ich habe mich dazu entschlossen auch rechts den Schlauch zu wechseln um das um 90° gebogene Ventil zu bekommen. Auch rechts habe ich an der Felge Schrammspuren gefunden, die vom Sensor stammen. Rechts wurde der Sensor dann fester gezogen, wobei er links abgeschraubt wurde. Nach dem Anbau an die Feder wollte ich den Sensor aufschrauben. Leider passt da etwas nicht. Die Gewindesteigung passt, möglicherweise ist der Durchmesser etwas größer bei diesen Ventilen. Das muss ich mit Tost klären.





Der Flieger kann wieder fliegen, aber ohne Reifendruck Sensoren an den Main Gear Wheels.
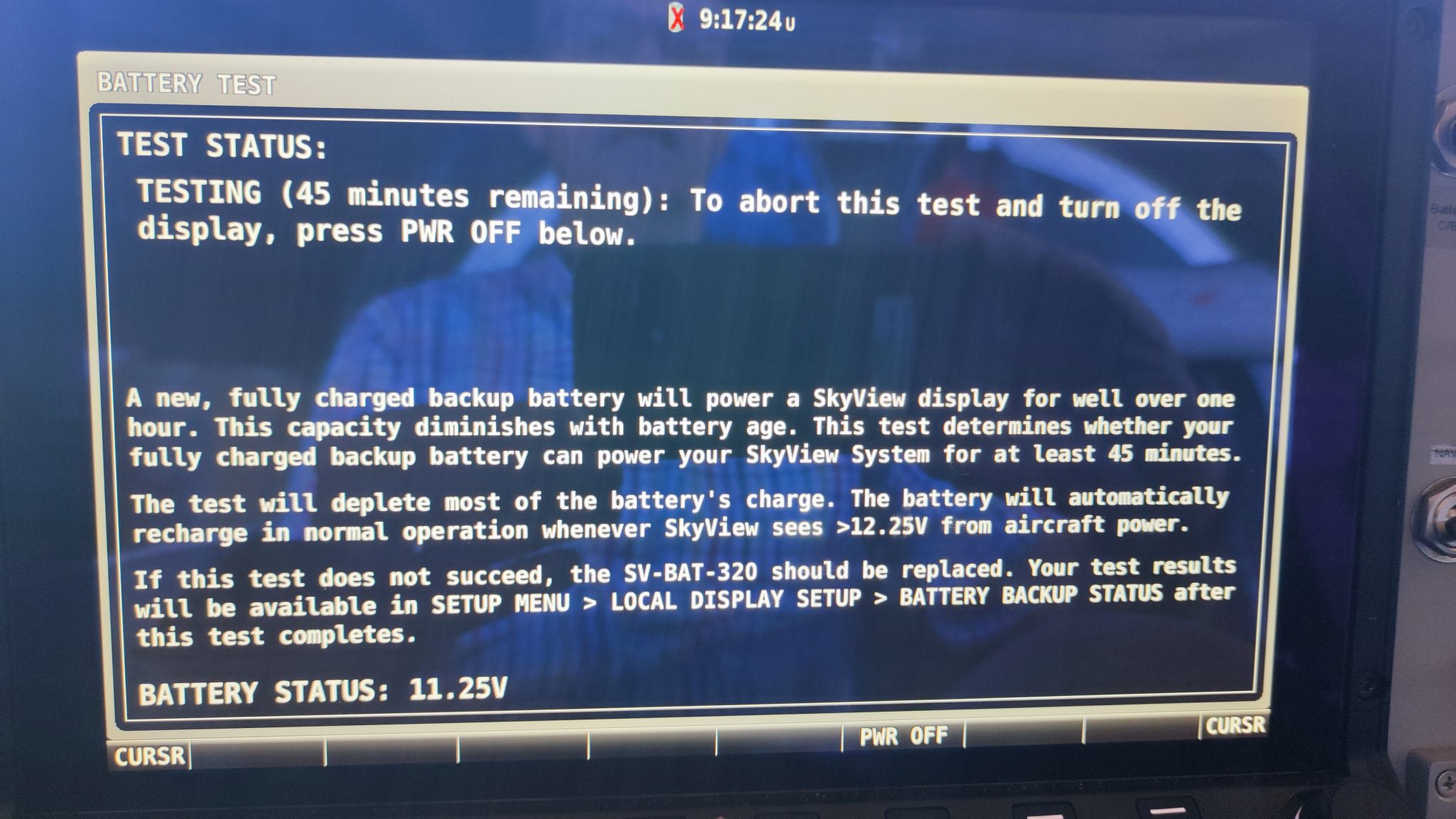
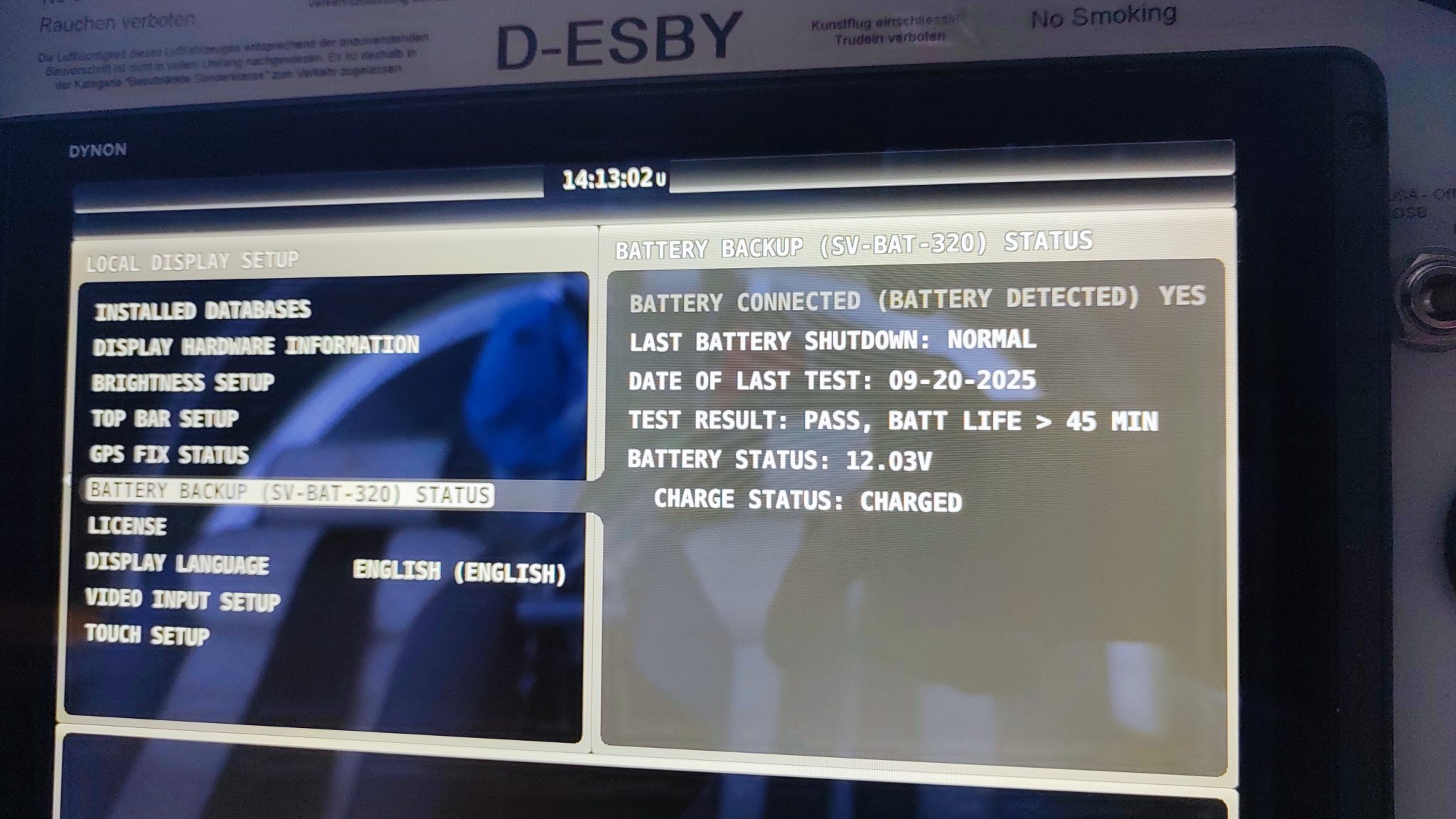
Während diesen Arbeiten habe ich den Dynon Backup Battery Test durchgeführt. Dieser sollte 1x im Jahr gemacht werden.