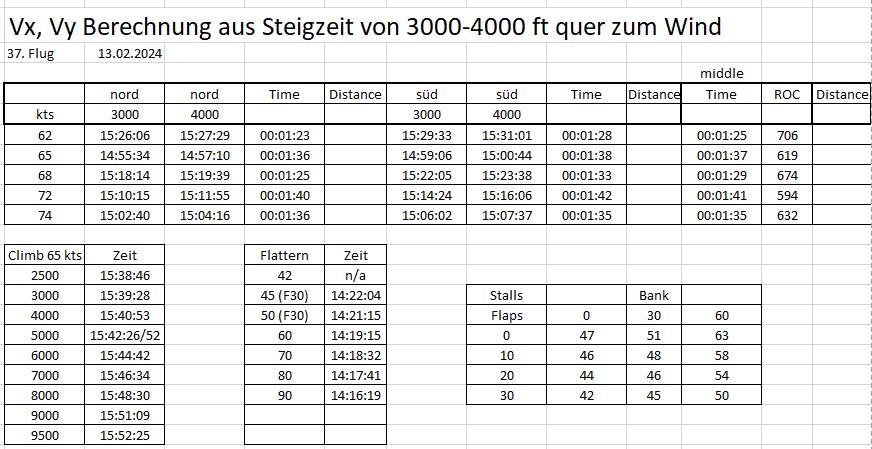
Das Batterie-Massekabel kam mir etwas stramm vor. Der Motor bewegt sich ja zum teil kräftig, wenn er gestartet wird. Damit die Batterie keinen Schaden nehmen kann, habe ich einen Winkel aus Messing gebaut, um den Anschluss für das Kabel von waagerecht auf senkrecht zu ändern. Dadurch bekommt das Kabel mehr Bewegungsfreiheit und ich kann das Kabel durch die Klappe der Cowling leicht abschrauben, wenn der Flieger stromlos gemacht werden muss. Ich habe ein 3×15 mm Material verwandt.
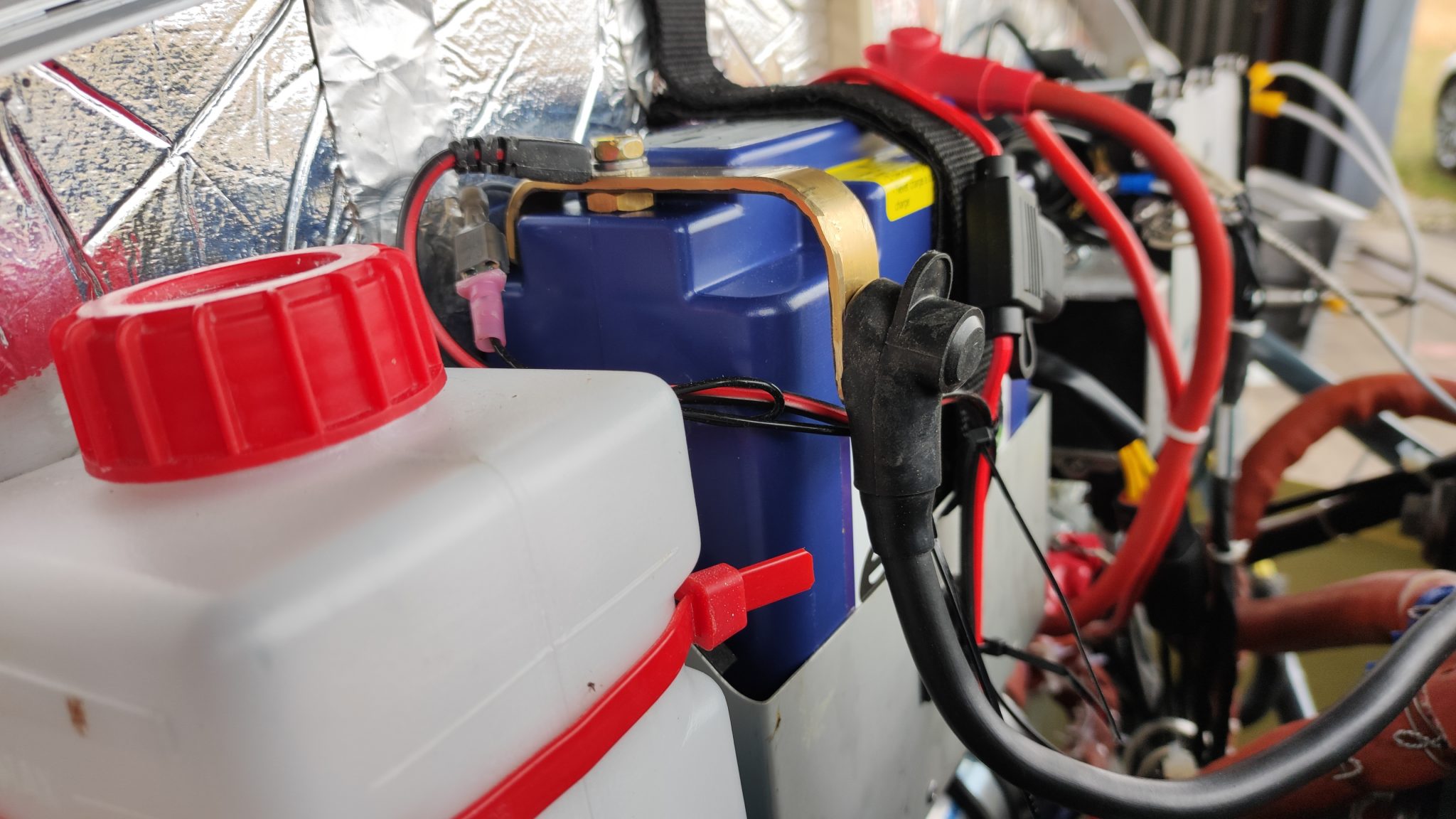

Danach wollte ich den Durchmesser der Alu-Rohre herausfinden, an die die Heizungsschläuche montiert sind, um eine Ableitung von der Klappenbox herstellen zu können. Hierfür wollte ich das aus der Cowling herausstehende Rohr messen. Dabei stellte ich fest, dass dieses Rohr ganz locker war. Von den 6 Flanken waren 4 abgebrochen und das Rohr ließ sich ganz leicht von links nach rechts bewegen. Die Nieten der 2 noch vorhandenen Flanken waren locker gewackelt. Ich gehe davon aus, das beim Motorstart sich der Motor so stark bewegt, dass das am Auspuff befestigte Rohr beim Start an der Cowling anschlug und dadurch die Flanges gerissen sind. Das Rohr hat auch Kontaktspuren auf der linken Seite. Ich habe die Aussparung für das Rohr jetzt nach rechts und vor allem nach links erweitert. Ein erneuter Kontakt dürfte jetzt ausgeschlossen sein, auch wenn das Rohr wieder fest montiert sein wird. Dafür muss aber die untere Cowling abgebaut werden. Diese Reparatur werde ich bei der 100 Stunden Kontrolle durchführen.




Jetzt wollte ich den AT-1 auf Firmware 31 updaten. Das hat nicht funktioniert. Möglicherweise hat Dropbox seine versteckte Datei .dropbox.device wieder auf den USB Stick geschrieben, weil ich ihn wohl nicht schnell genug nach dem Löschen herausgezogen habe. Diese Datei verhindert des Update! Auf zum nächsten Versuch.
Den Definitions-File für den CO-Warner habe ich auch auf beide HDXe geladen. Die Konfiguration war noch vorhanden. Somit war dieser Punkt schnell erledigt.
Ja und dann habe ich noch die Aufzeichnungsfrequenz des User-Logs von 4 auf 1 pro Sekunde geändert.
Die Camera Stativ Halterung habe ich auch geändert. Ich habe sie von vorn auf die Rückseite der Trennwand zum Gepäckraum verlegt und einen USB-Verteiler angebracht, sodass ich jetzt beide Cameras mit USB Strom versorgen kann.