Ich habe festgestellt, dass auf der CD mit dem 3. Gutachten, das bereits beim LBA liegt, das Ergebnis der Schallpegelmessung in nicht unterschriebener Form vorliegt und das eigentliche Ergebnis auch nicht enthalten ist. Ich habe die unterschriebene Version einschließlich dem Ergebnis an Herrn Goldschmidt gemailed, verbunden mit der Frage, ob die Zulassung bis 20.02.2026 klappen könnte. Leider bekam ich die Information, dass das Flugzeug auch vom LBA nachgeflogen werden muss und dafür „wärmeres Wetter“ und „längere Tage“ nötig wären und ich doch besser nochmals eine VVZ beantragen sollte. Das hat natürlich „viel Freude“ bereitet und ich habe zuerst mit Bauprüfer Markus einen Termin für den 14.02. arrangiert, damit er nochmals eine Unbedenklichkeitsbescheinigung ausstellen kann. Ich gehe jetzt davon aus, dass wenigstens im Sommer die endgültige Zulassung erfolgen wird.
Mittlerweile habe ich auch das bestellte Batterieladegerät erhalten, das ich bei Böttcher für 95 € plus Versand bestellt hatte. Ich ging davon aus, dass dieses Ladegerät, welches sowohl von EarthX als auch von Rotax als Ladegerät empfohlen wird, nur in USA zu bekommen wäre. Aber da habe ich falsch gedacht. Es ist das Optimate Autobatterie-Ladegerät Lithium TM390 12V, 6A mit Batterietester & Erhaltungsladung. Damit habe ich meine Batterie innerhalb 3 Stunden das 1. Mal auf 14V laden können. Das gute an diesem Ladegerät ist, dass es auch die Möglichkeit bietet, konstant 13,6V Strom bis 8A zu liefern, um das Flugzeug mit Strom versorgen zu können, um zum Beispiel Upates der Avionik installieren zu können, ohne die Batterie auszusaugen.
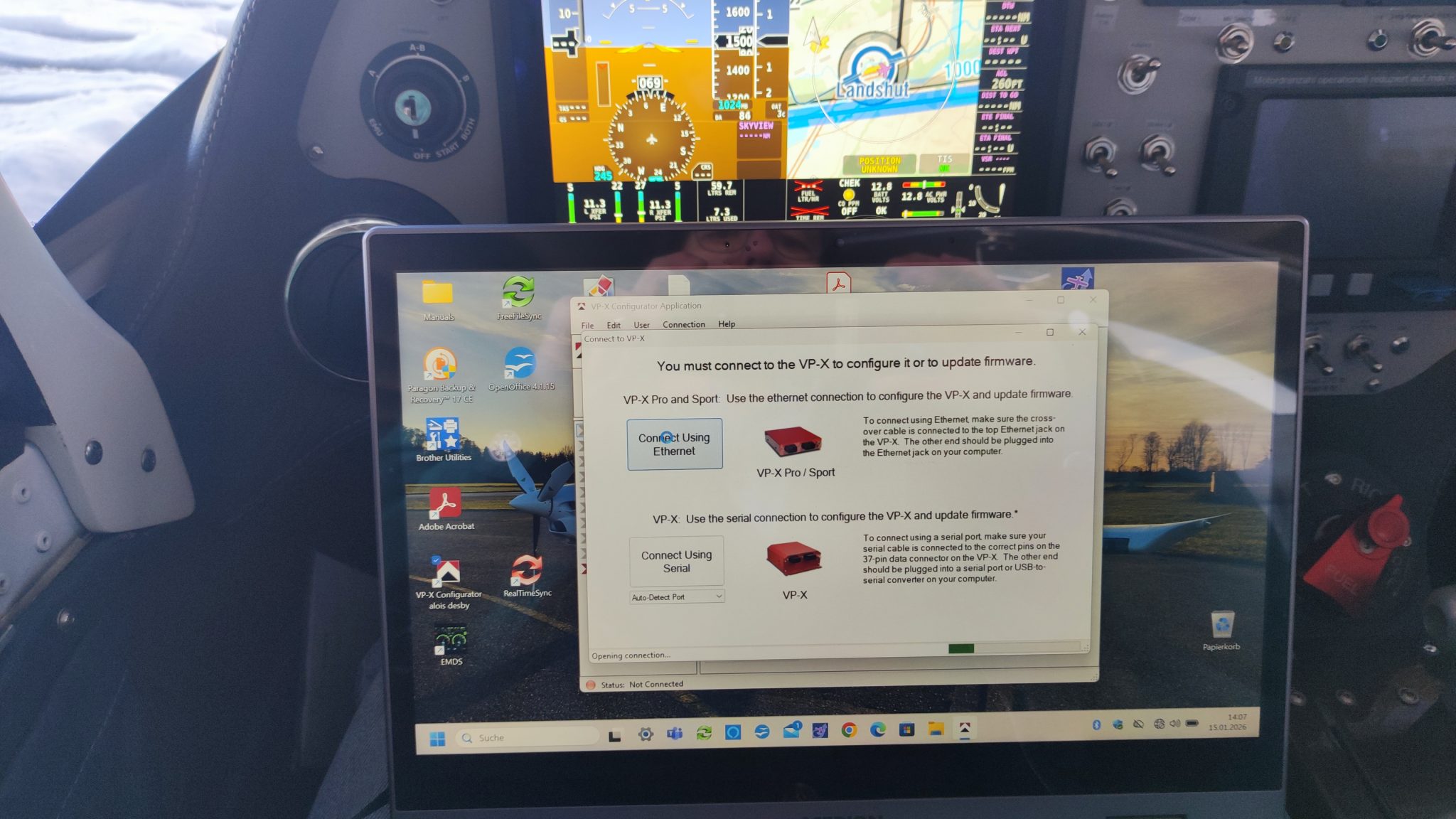
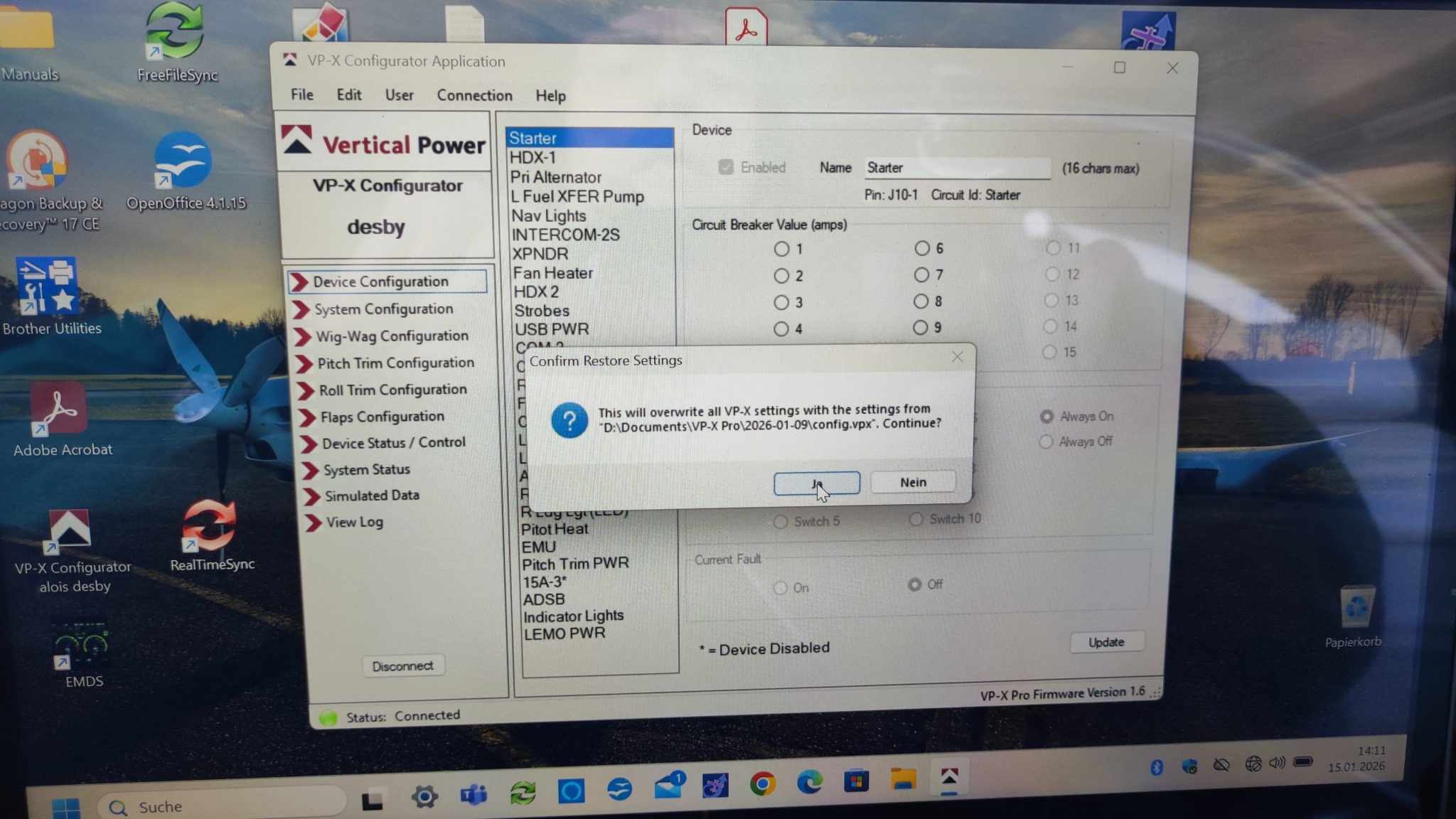
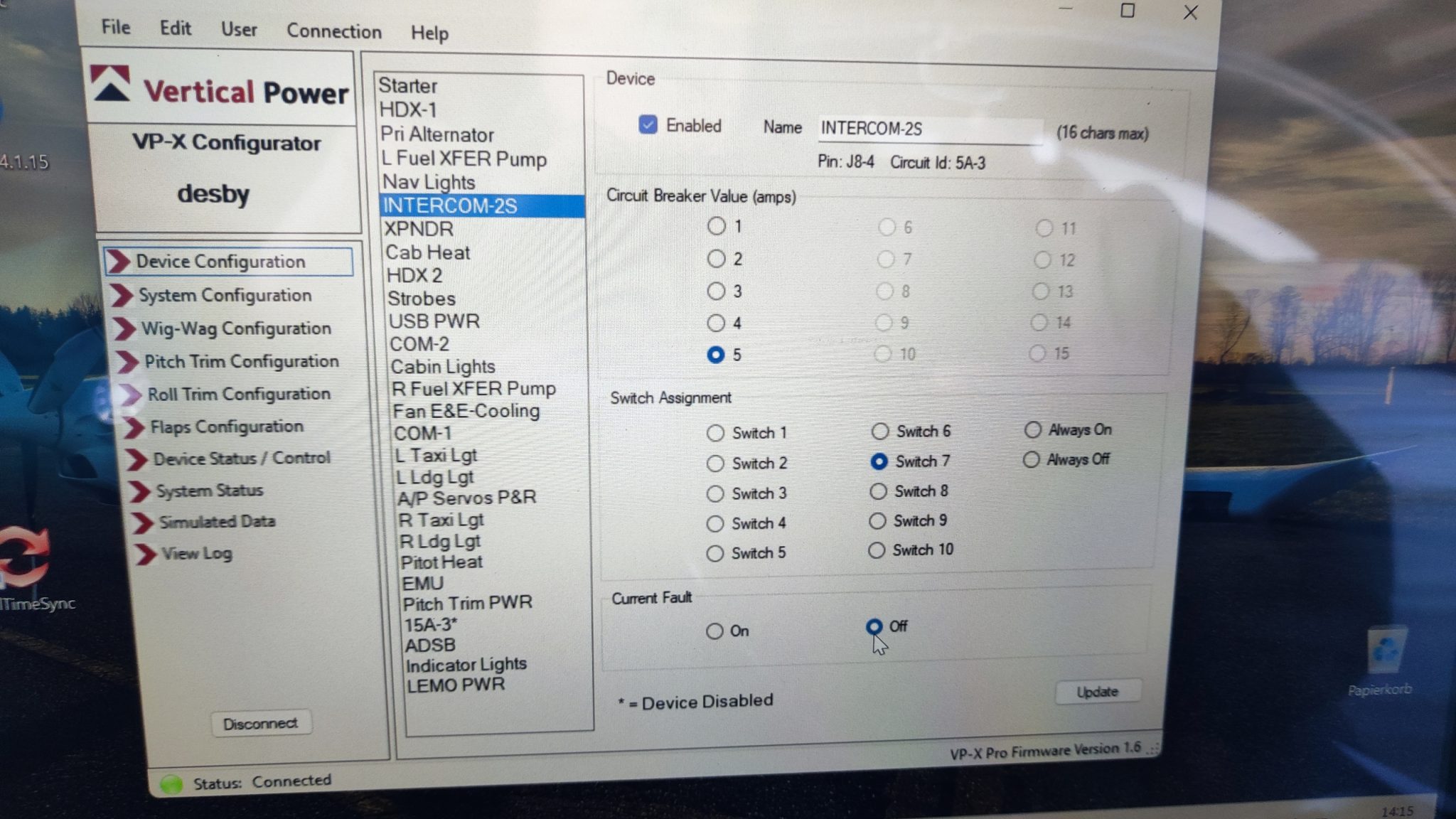
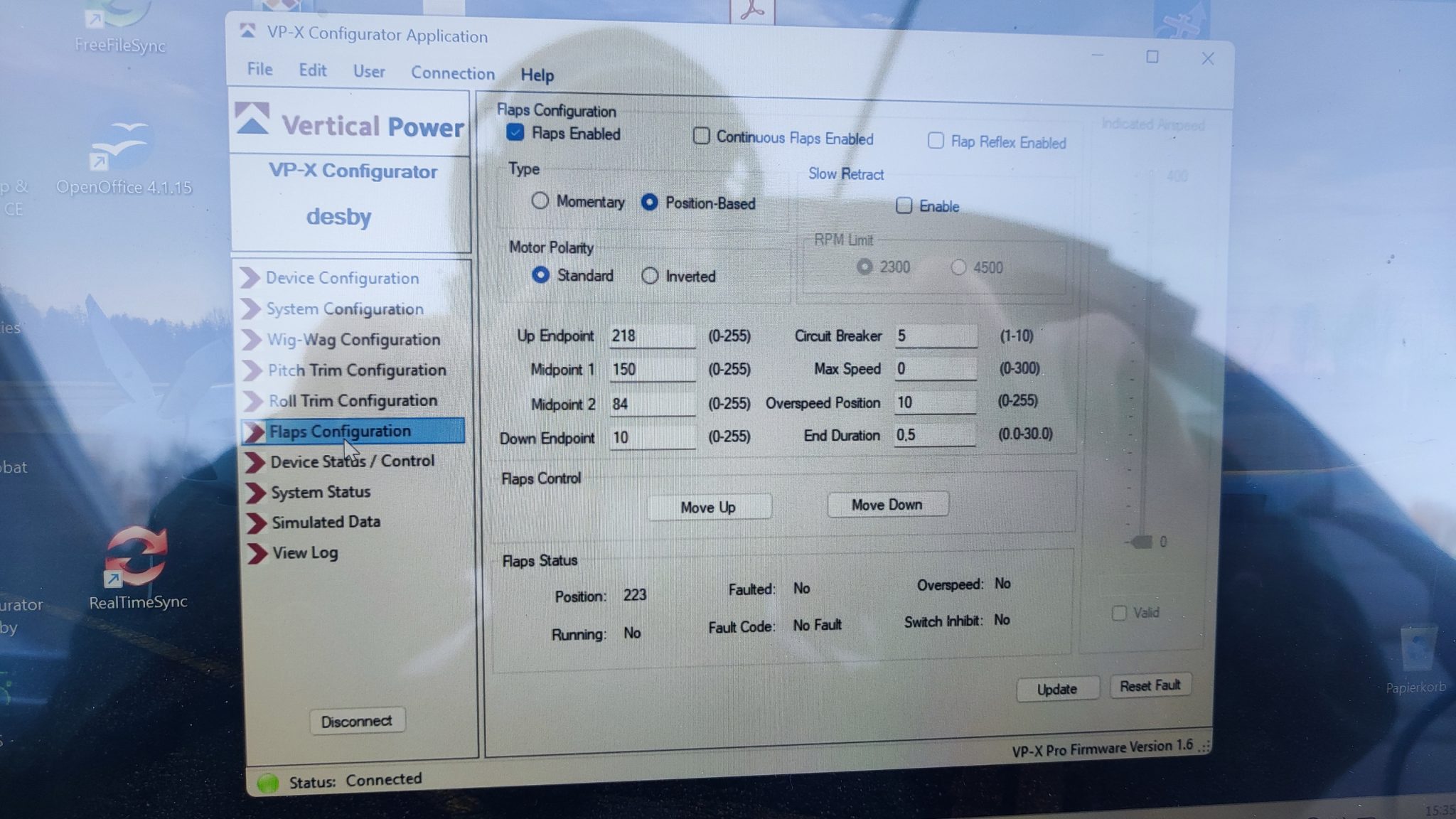
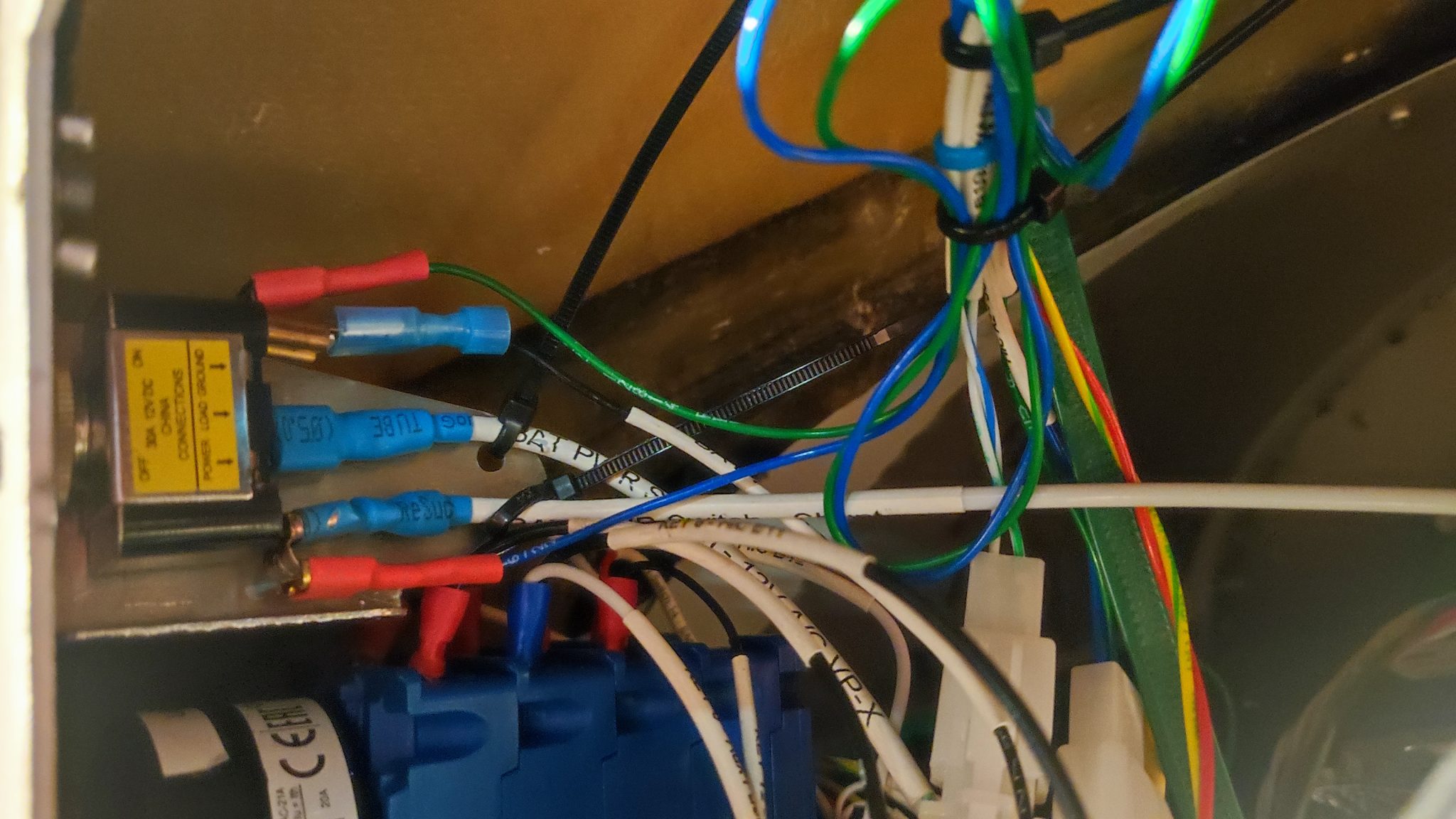
Das Wetter hat heute gepasst. Mit meinem Windows Laptop, dem USB-Netzwerk-Adapter und einem LAN Kabel ausgerüstet, konnte ich die am 10.01.2026 erstellte Konfigurationsdatei in die VP-X laden. Schnell stellte sich heraus, dass das Einschalten der „Current Fault Detection“ bei allen Verbrauchern ein Fehler war. Denn sofort nach dem Laden der Datei erhielt ich diverse Faults angezeigt. Das ging mit den Cabin Lights an, weil diese nicht von der VP-X geschaltet werden, sondern am Sicherungs-Pin J10-7 angeschlossen sind, der „always on“ confguriert ist, damit die Lampen getrennt mit den Schaltern geschaltet werden können. Ist also kein Schalter auf On, so versteht das die VP-X als „durchgebrannte Birne“ und erzeugt die Fault Meldung. Auch andere Verbraucher erzeugten Fehlermeldungen. Diese habe ich dann alle mit dem Konfigurator zurückgestellt auf „No“: ADS-B, Cabin Lights, EMU, Intercom-2, Indicator Lights, XPPDR. Zusätzlich habe ich noch USB-PWR und LEMO-WPR ebenfalls auf „Off“ geschaltet.
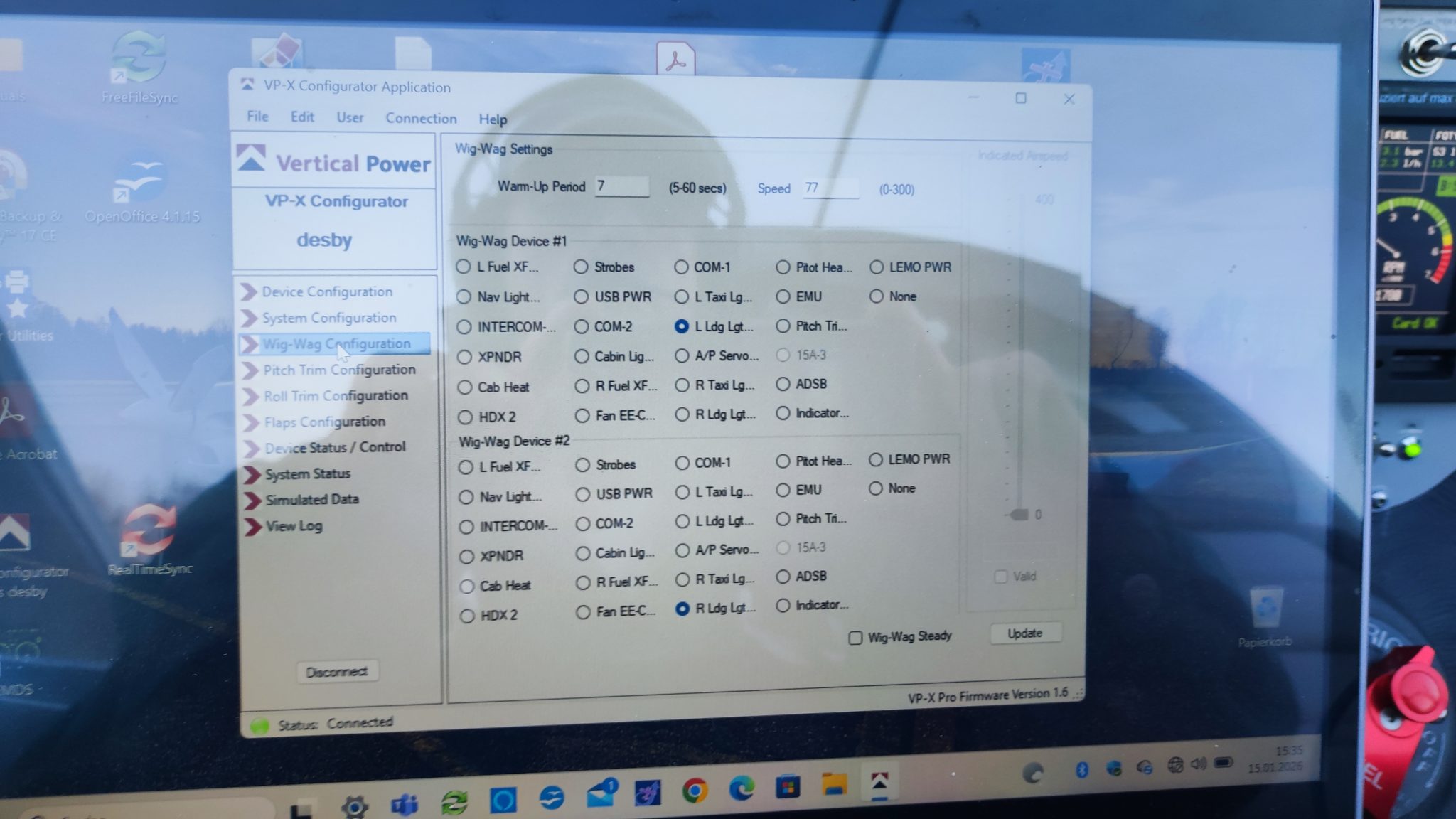
Nachdem diese Einstellungen getätigt waren, habe ich doch eine Platzrunde bei schönstem Sonnenschein gedreht. Dabei ist mir aufgefallen, dass die Flapkonfiguration überschrieben wurde und sich die Flaps nur noch bewegten, wenn ich den Tastschalter gedrückt hielt. Das war für den Flug kein Problem. Nach der Landung habe ich gleich den Konfigurator nochmals geladen und zuerst die Wig-Wag Funktion der LDG-Lights wieder eingeschaltet und anschließend die Flaps reconfiguriert, damit sie per Click auf das nächste Setting fahren und mit einem Click eingefahren werden können. Was ich aber dabei übersehen habe, ist die Konfiguration der Flap Overspeed Warning. Das muss ich nochmals in Angriff nehmen.
Die Lampen sind angekommen, sodass ich sie heute einbauen konnte. Zusätzlich habe ich senkrechte Stege eingebaut, weil ich auf der rechten Seite bemerkt habe, dass die Lampen etwas Schwingen konnten. Auch rechts habe ich die Stege jetzt eingebaut. Die Lampen sind jetzt viel stabiler.
Nachdem die mittleren Rivnuts im linken Lampenschacht ausgebohrt sind, habe ich noch 2 Winkel hergestellt, die ich auf der Rückseite als Versteifung einbauen werde. Die muss ich aber erst wieder zuhause lackieren.
Die Beschriftung für das BAT Voltmeter habe ich auch angebracht und damit den Einbau des Voltmeters abgeschlossen.
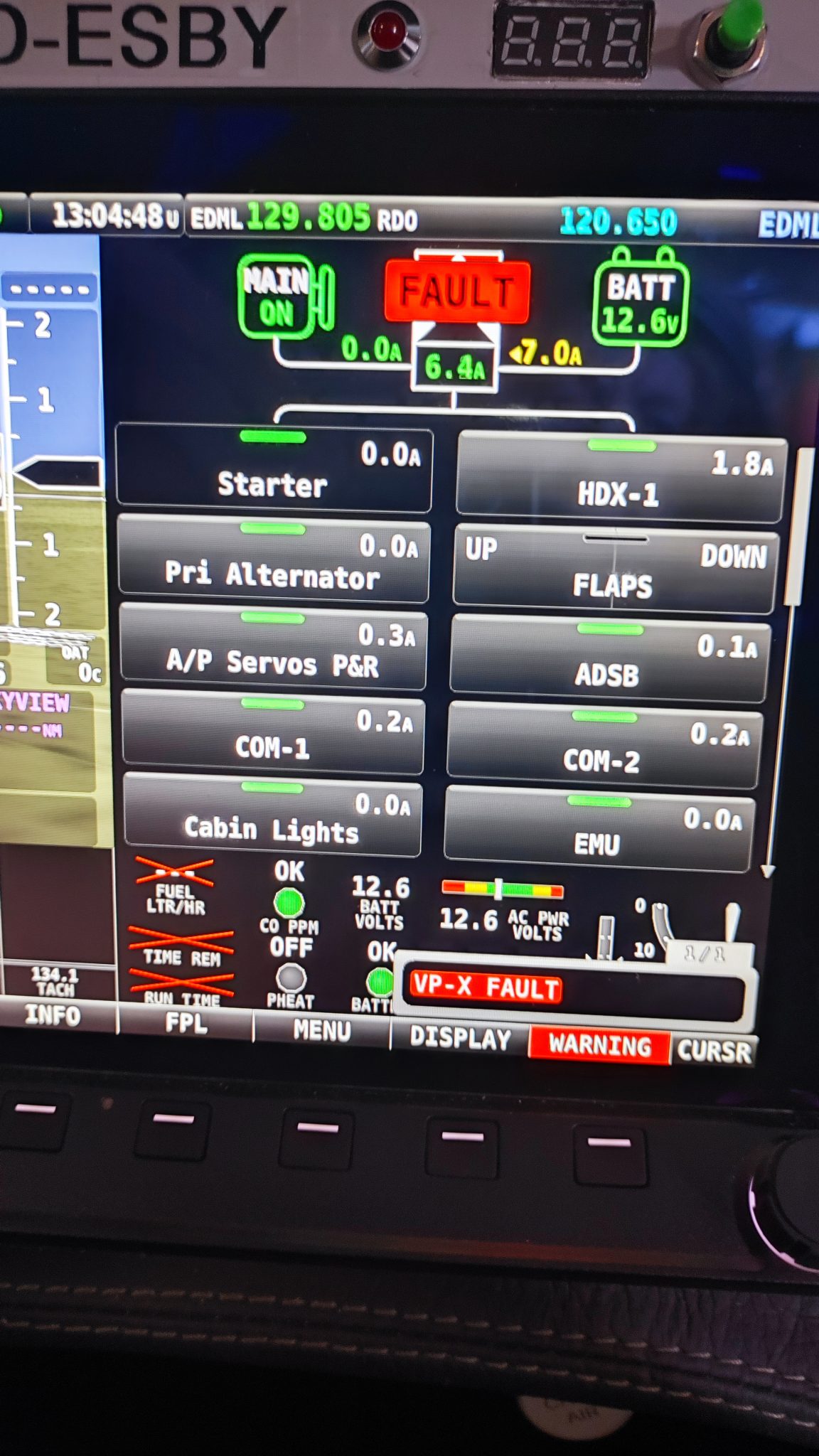
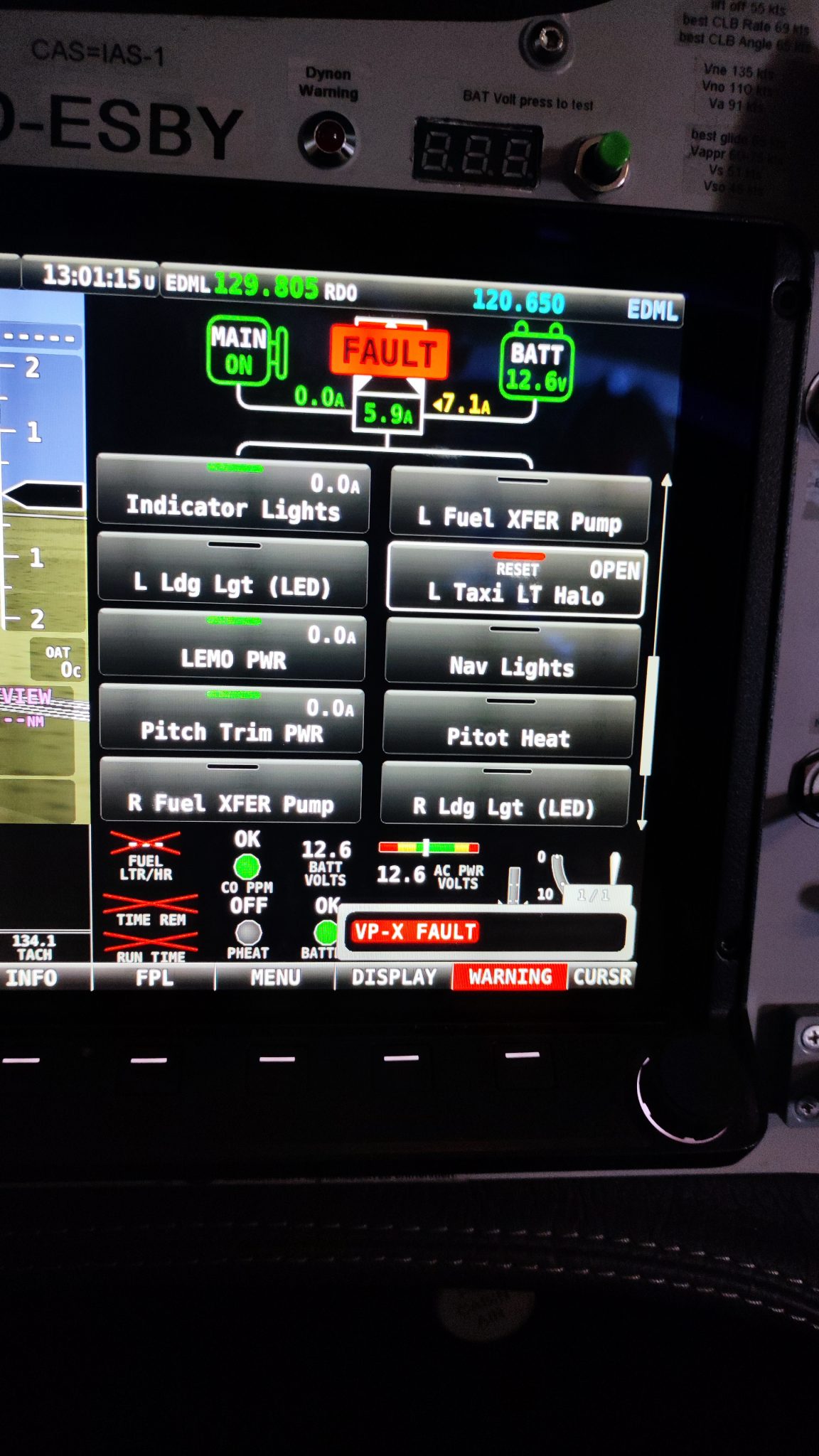
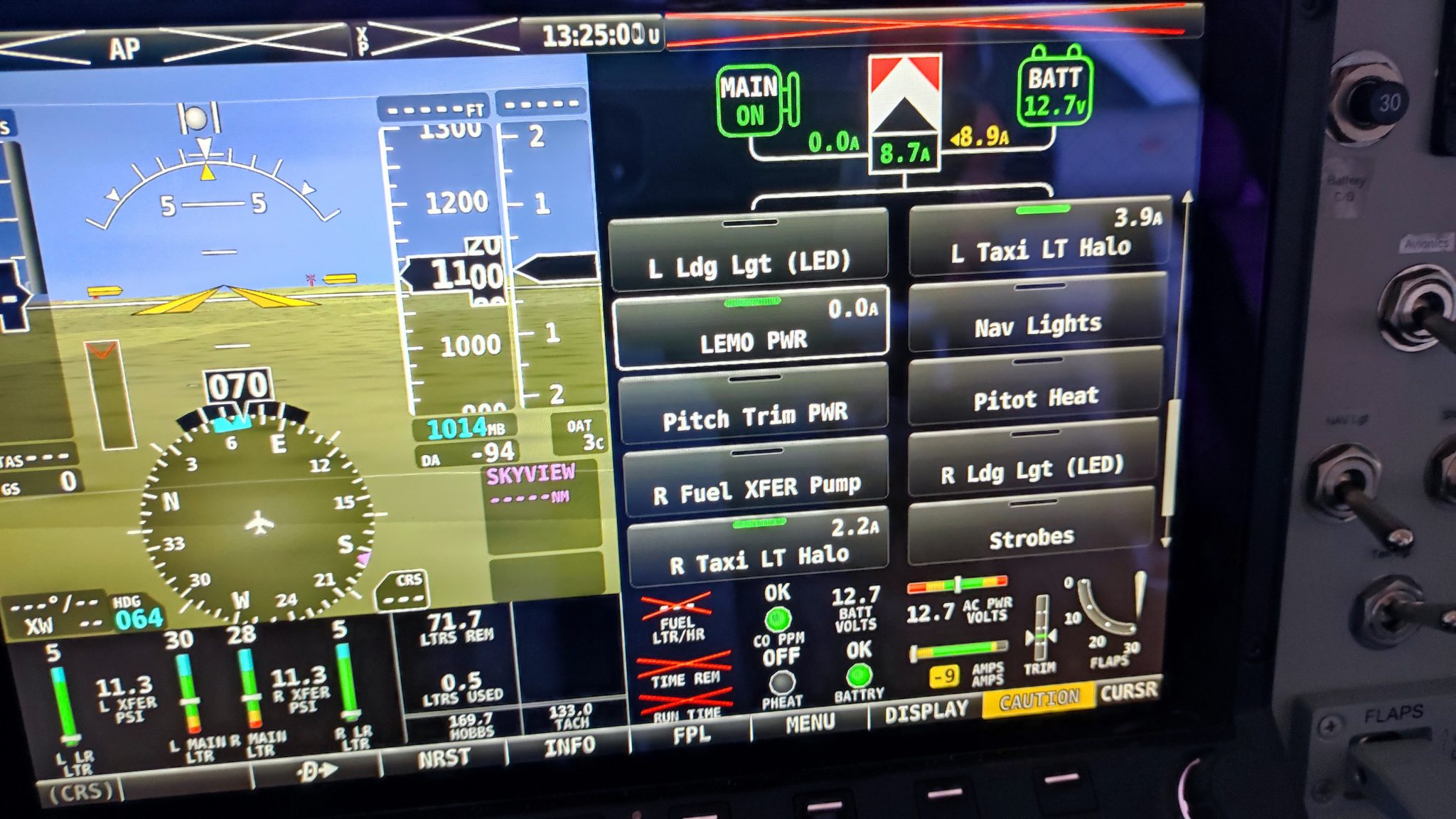
Ich soll ein Protokoll über die Erfahrungen mit der VP-X erstellen. Hierfür habe ich heute einige Tests gemacht und eine Bilderfolge erstellt, die das Arbeiten mit der VP-X erklärt. Die VP-X ist ja nicht nur ein Sicherungskasten sondern auch eine Relais-Schaltzentrale. Alle am Instrumentenbrett vorhandenen Schalter schalten nicht den Verbraucher sondern geben nur das Signal an den jeweiligen Relais-Kanal in der VP-X. Diese kann 2 Störungen erkennen. Die eine ist wie bei einer herkömmlichen Sicherung der Zustand des zu hohen Stroms, was z. B. bei einem Kurzschluss der Fall ist. Die andere ist das Erkennen, wenn mit dem Verbraucher etwas nicht stimmt, z. B. wenn eine Lampe durchgebrannt ist und dadurch der Widerstand im Stromkreis auf Unendlich steigt. Tritt eines dieser Ereignisse ein, ertönt eine akustische Warnung „Engine monitor“ über das Headset parallel zum blinkenden Dynon Warning Light und der optischen Warnung in rot auf den Dynon HDXen unten rechts. Daraufhin drückt man auf die Taste unter der „Warning“ und erhält die Information VP-X FAULT in rot. Über den Menüpunkt „Display“ wählt man dann die VP-X aus und kommt dadurch zur Tabelle der installierten Verbraucher. Mit dem Drehknopf scrollt man dann soweit nach unten, bis man einen Verbraucher mit einem roten Balken findet. Hier „L Taxi LT Halo“. Dieser kann dann resettet werden um die Warning zu beenden. Sinnvollerweise schaltet man diesen Verbraucher vorher aus. Um sicher zu gehen, dass nicht noch ein zweiter Verbraucher betroffen ist, scrollt man bis zum Ende durch.
In der bisherigen Flugerprobung ist dieser Fall noch nie eingetreten. Erst als ich meine Scheinwerfer ausgebaut hatte und den Strom eingeschaltet hatte um das AV/OB Update zu installieren, ist mir die Warning das 1. Mal bewusst geworden. Die VP-X funktioniert also bestens. Ein weiterer positiver Punkt ist, dass die VP-X die Ampere der einzelnen Verbraucher anzeigt und auch den Gesamtstromverbrauch sowie die Ampere, die von der Batterie kommen. Die Ampere vom Generator werden durch den Unterschied errechnet.
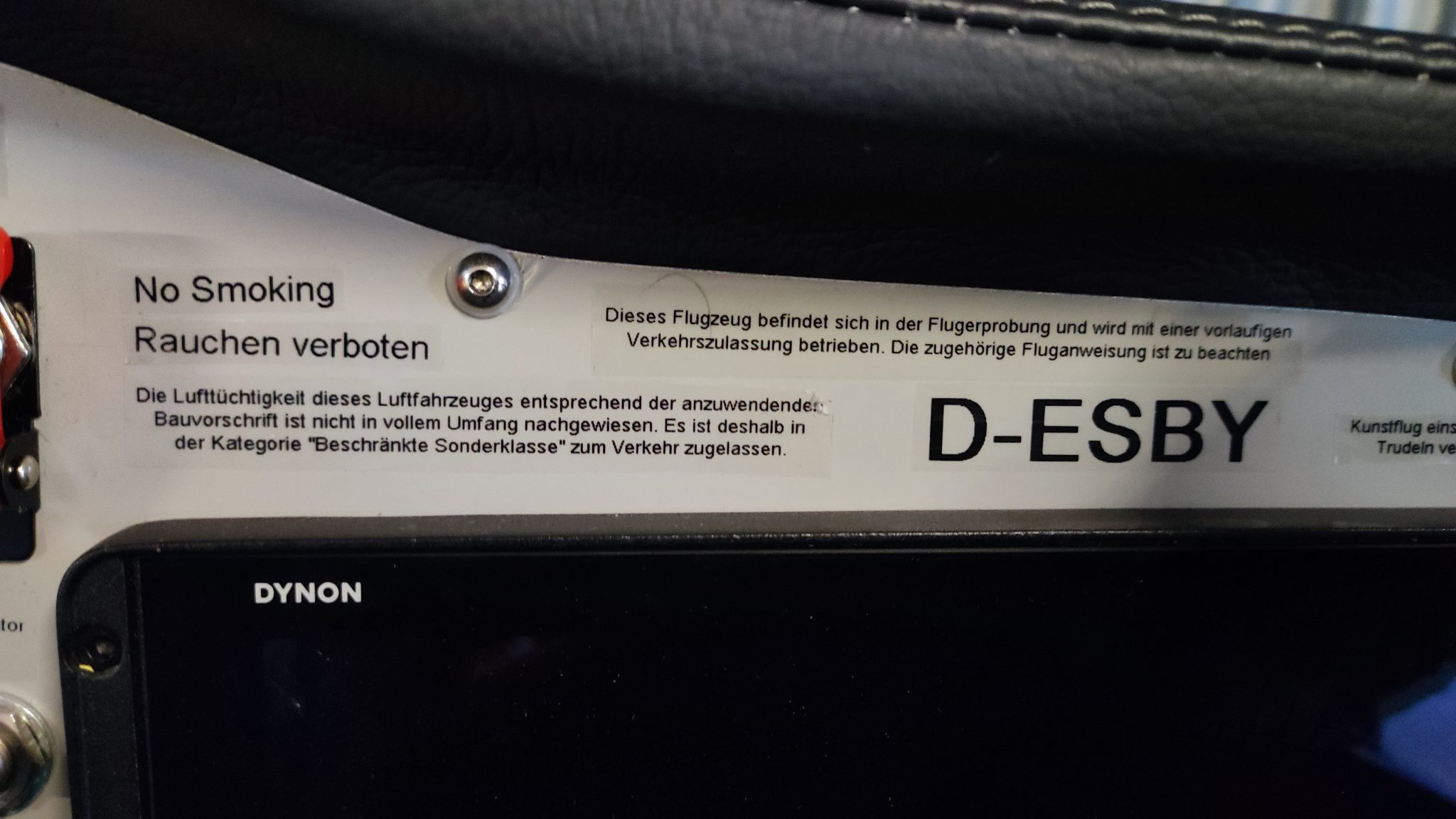
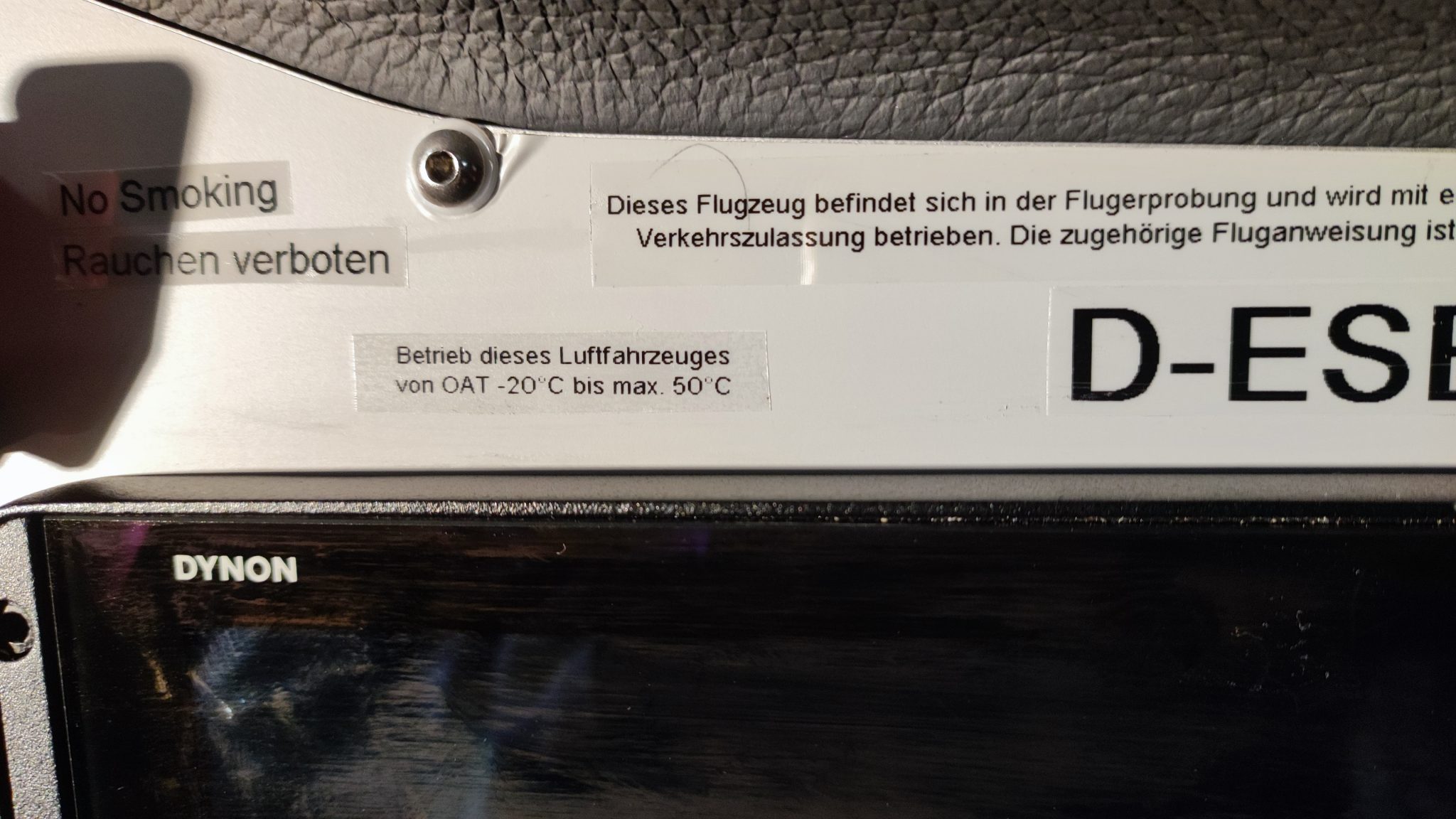
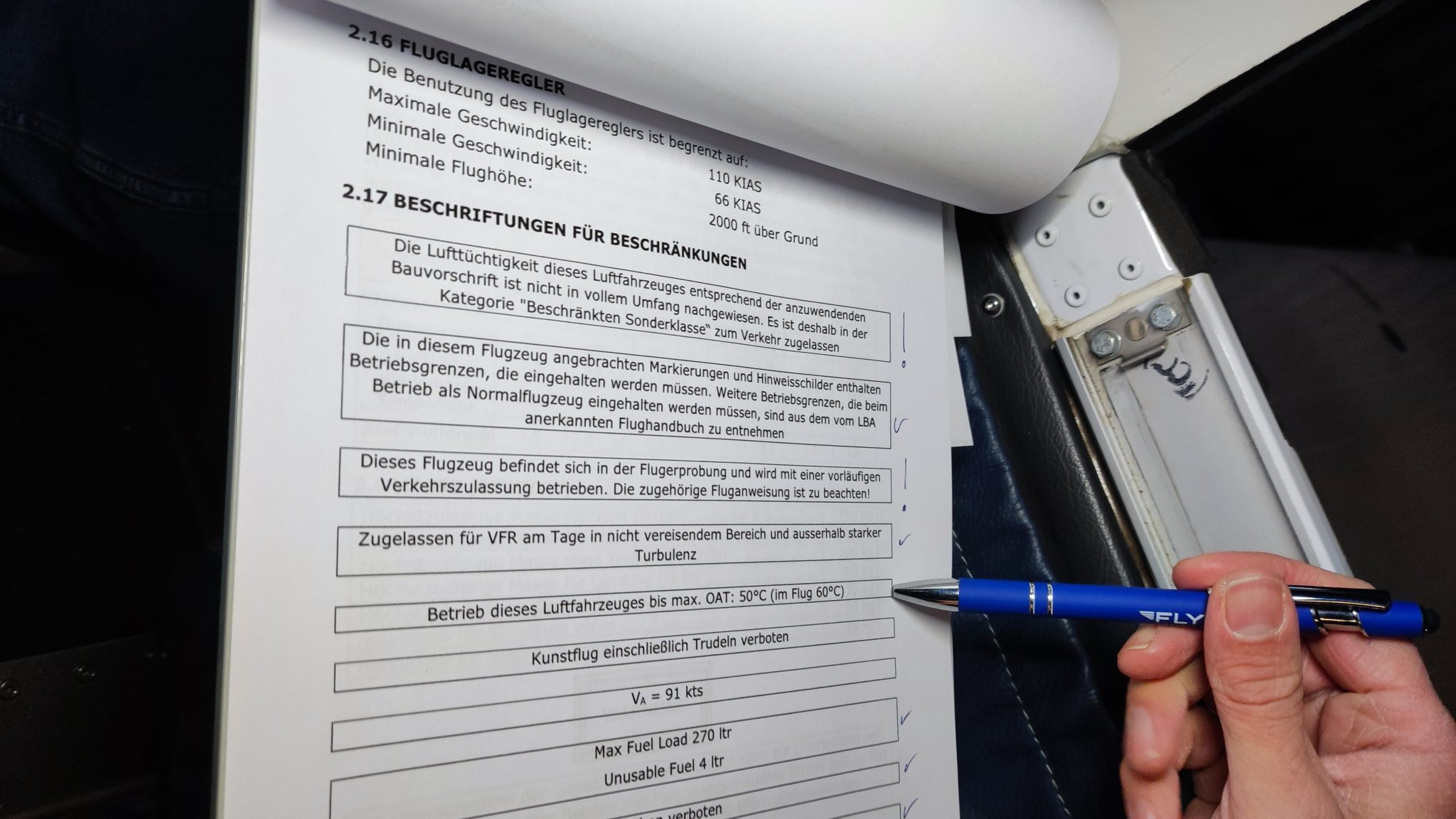
Bei der Durchsicht der Beschriftungen ist aufgefallen, dass eine zu viel angebracht ist, die erst nach der endgültigen Zulassung angebracht werden muss und dass eine fehlt, die die max OAT betrifft.
Ich habe die eine entfernt und mit der anderen ersetzt.
Zuhause habe ich gestern den Halter für die beiden LED-Scheinwerfer schwarz matt lackiert und jetzt die rechten LEDs fertig eingebaut.
Die Verkabelung des BAT Voltmeters habe ich auch fertiggestellt.
Danach habe ich den linken HDX wieder eingesetzt. Gutachter Dominik Schmieg war am Flieger zur Klärung einiger Fragen, die für das 3. Gutachten noch offen waren.
Die linke Seite habe ich jetzt auch soweit vorbereitet, wie es mir möglich war. Das heißt, den Halter der rechten Seite kopieren und die Schächte mit schwarzmatter Farbe ausbessern, nachdem ich die rechten Lampen wieder ausgebaut hatte.
Im Gespräch mit Wolfgang Madlsperger kam die Idee zustande, eine Messung der Batteriespannung schon vorher machen zu können, bevor ein Verbraucher wie die VP-X bzw. ein HDX angeschaltet ist, die bisher zum Ablesen der Bordspannung nötig waren. Um den Ladezustand der Batterie jetzt ohne Load messen zu können, habe ich ins Instrumentenbrett einen Taster und ein Voltmeter eingebaut.
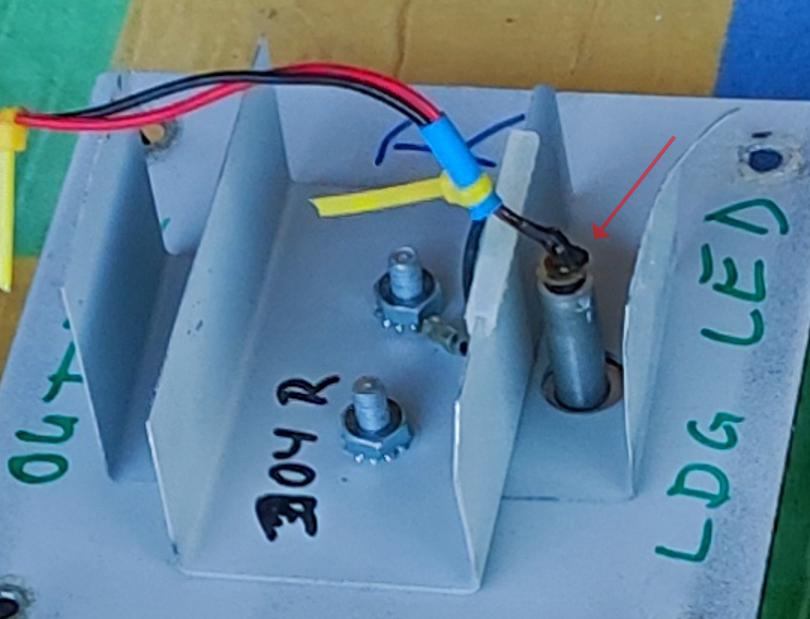
Die neuen LED Lampen sind angekommen, die ich zu Testzwecken bestellt habe. Der erste Montageversuch scheint geglückt zu sein. Vorher habe ich aber alle Steckverbindungen der Lampen vereinheitlicht. So konnte ich jetzt auch analysieren, ob die unterschiedliche Amperewerte der Halogenlampen an der Verkabelung liegt oder an den Lampen selbst. Ich habe rechts mit links vertauscht und der „Fehler“ ist mitgewandert. Deshalb kann es nicht an der Verkabelung liegen.
Offensichtlich ist die Halogenbirne der Originallampe kurz vor seinem Lebensende. Aber ich wollte die Halogenlampen sowieso eliminieren und mit LEDs ersetzten. Die neuen LEDs ziehen nur 1,3 A pro Lampe. Das sind gute Voraussetzungen, um mit der Gesamt-Load des Systems möglichst unter 20 A zu bleiben. Gut aussehen tun sie außerdem noch dazu. Die Halterung muss natürlich noch lackiert werden. Jetzt muss ich nochmals 4 LEDs bestellen. 2 für die linke Seite und 2 als Reserve.
Zu aller erst wollte ich heute mal wieder fliegen. Der 27-Minuten-Flug hat mal wieder Spaß gemacht.
Um den Ungereimtheiten bei den angezeigten Verbräuchen der verschieden Lampen für Taxi- und LDG-Lights feststellen zu können, habe ich diese ausgebaut.
Die rechte H3 Birne hat aber auch 55W auf der Fassung stehen. Jetzt war ich mit meiner Weisheit erst einmal zu Ende. Weitere Tests mit Tauschen der Positionen konnte ich aber nicht durchführen, weil ich die rechten Lampen mit anderen Steckern verbunden hatte als die linken. Da wartet also noch Arbeit auf mich. Vielleicht hängt das aber auch mit der defekten rechten LED zusammen. Beide haben die gleiche Masse. Die defekte Halogen Leuchte zeigt eindeutige Schmorspuren am Kabeleintritt in das LED-Gehäuse.
Nachdem die Taxi- und LDG-Lights mit etwa 10A zu Buche schlagen und das Pitot Heat, wenn es den Maximalstrom zieht, mit 8,5A, versuchte ich die einzelnen Loads der Lampen herauszufinden. Über die Unterschiede war ich recht erstaunt:
Left Taxi (Halogen) 55W 3,9A Right Taxi (Halogen) 55W 2,2A
Left LDG (LED) 1,1A Right LDG (LED) 2,7A
Ich fand bei dem rechten LDG Light (LED) nur 3 LEDs leuchtend. Beim linken LDG Light (LED) alle 9 LEDs. Verwunderlich ist, dass das defekte LED, bei dem nur noch 3 LEDs leuchten, einen mit 2,7A deutlich höheren Stromverbrauch hat als die LED, die noch in Ordnung ist mit 1,1A.
Auch die unterschiedlichen Verbräuche der Halogen Taxi Leuchten hat mich verwundert. Links 3,9A würde mit 12V und 55W rechnerisch einigermaßen passen. Die 2,2A bei der rechten machen mir aber Probleme. Ich habe vermutet, dass es sich um eine Birne mit weniger Watt handeln könnte. Aber dazu muss ich sie erst einmal ausbauen.
Als nächstes wollte ich wissen, ob der Generator B denn tatsächlich die max Load von 30A bringt oder nicht. Ich habe alles eingeschaltet, was an elektrischen Verbrauchern einzuschalten ging und hatte dann die Batterie ausgeschaltet. Der Generator hat den vollen Demand übernommen. Im Moment des Fotos waren das nur 27,1 A bei 13,1 V, weil das Pitot Heat wohl gerade eine Stufe heruntergeschaltet hat. Die Differenz von 0,2A, die angeblich die Batterie beisteuert und dadurch die GEN Load nur mit 26,9A angezeigt wird, dürfte wohl darauf zurückzuführen sein, weil die Load durch ein Amperemeter direkt gemessen wird und der Demand von der VP-X berechnet, und eine Differenz als Battery Load angezeigt wird, die in diesem Zustand ja 0A sein müsste. Damit war ich erst einmal zufrieden.
Jetzt habe ich die Stecker der Generatoren A und B abgezogen und den Backup BAT Switch eingeschaltet. Dies stellt die Situation im Flug nach, bei der beide Generatoren ihren Dienst quittieren und die Batterie die alleinige Stromquelle darstellt. Ich wollte wissen, ob bei normalem Ladezustand der Batterie der Motor mindestens 30 Minuten läuft oder vielleicht schon vorher ausgeht. Ich startete den Motor um 1408 und schaltete alle Verbraucher bis auf EMU (1,1A) und COM 1 (0,2A) aus. Die VP-X zieht gerechnet 0,7A. Somit zusammen 2A plus 5,3A, die der Motor für Fuel Pumps, ECU und Einspritzung verbraucht. Die HDXe wurden durch ihre eigenen Backup Batterien gespeist. Die Batterie zeigte eine Spannung von 12,8V. Der Gesamtverbrauch wurde mit 7,3A angezeigt.
Nach einer Weile des Wartens kam mir die Idee, dass der Motor bei normaler Last (Fuel Flow etwa 15 l/min) mehr Strom benötigen würde als in Idle und erhöhte die Leistung entsprechend. Der Stromverbrauch stieg dadurch von 7,3A auf 10,5A.
Nachdem ich den Motor auf dem Apron aber nicht ½ Stunde bei dieser Leistung laufen lassen wollte, zog ich ihn wieder auf Idle und schaltete den linken HDX wieder auf das Bordnetz und weitere Verbraucher wie den XPNDR wieder ein, um auf den gleichen Stromverbrauch von 10,5A zu kommen und ließ den Motor so weiterlaufen.
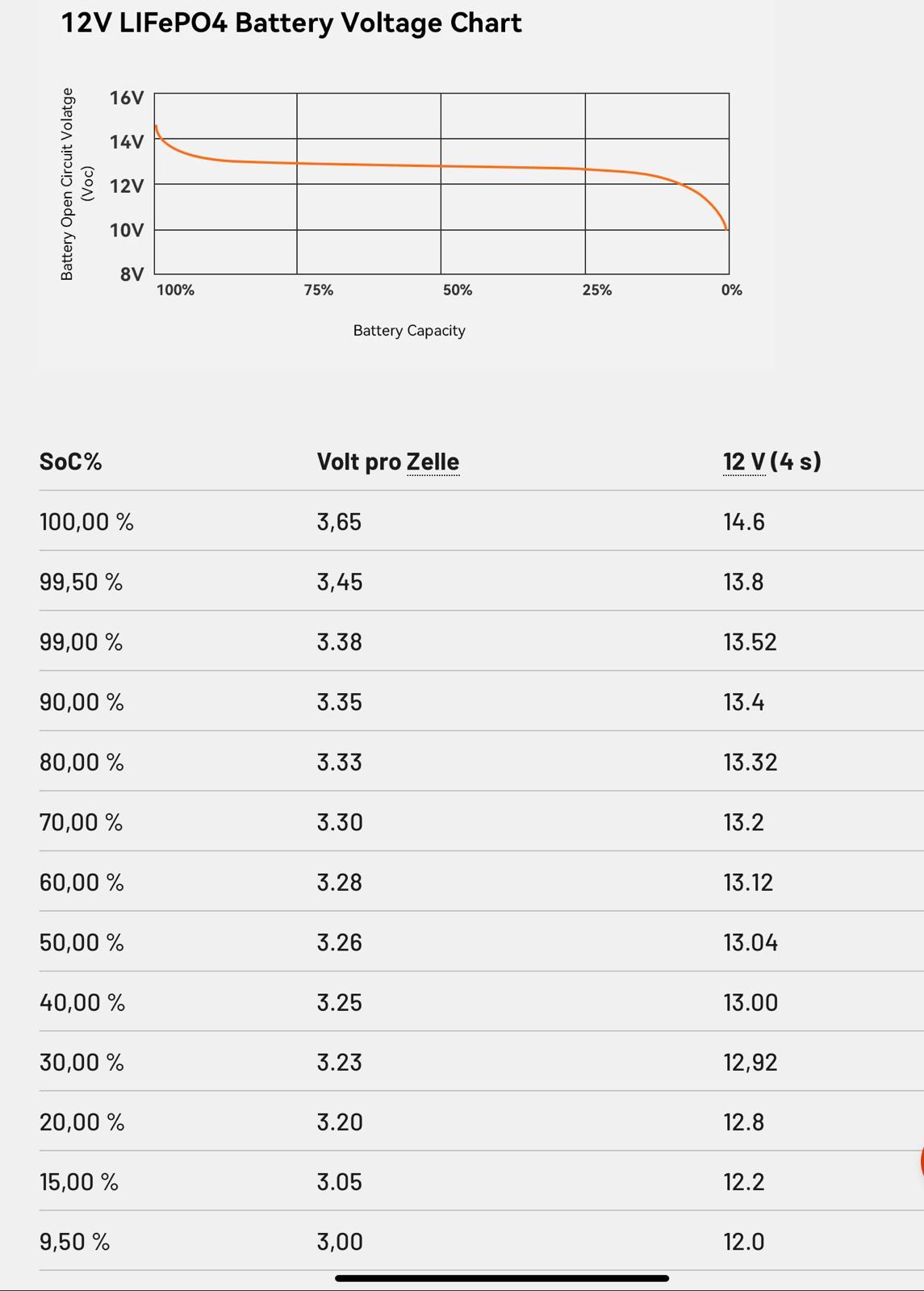
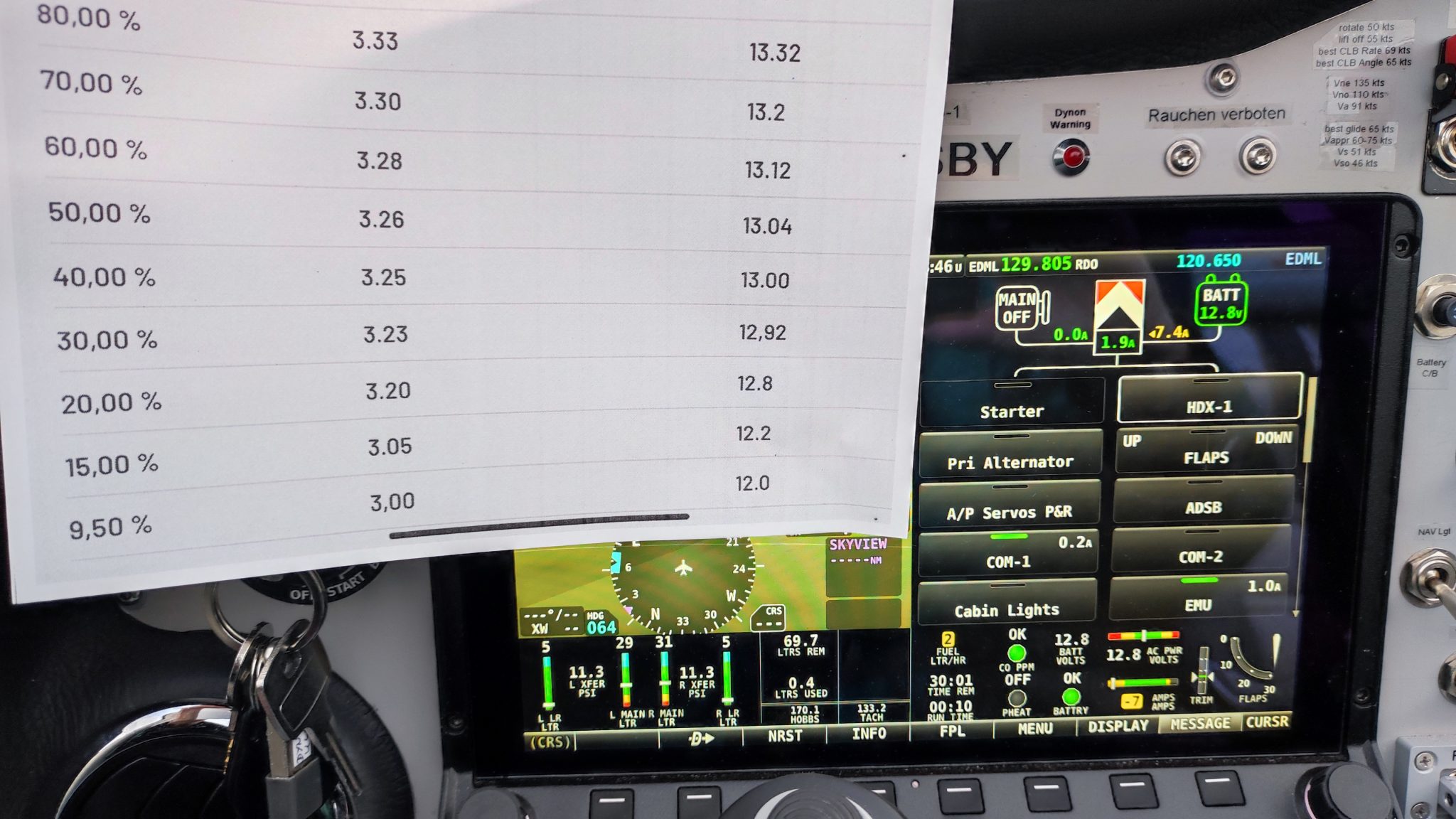
Ich hatte keine Möglichkeit mit einem Voltmeter vor dem Einschalten der Batterie, und damit des gesamten Tests, die Ausgangsspannung der Batterie zu messen, um den Ladezustand feststellen zu können. Die angezeigten 12,8V waren ja schon unter Last gegeben. Laut Tabelle würden 12,8V aber nur etwa 20% Ladezustand entsprechen.
Ich wollte die Batterie nicht unter 10% und damit 12,1V entladen um eventuelle Resetprobleme zu vermeiden, die ich vielleicht bekommen würde, wenn ich die Batterie soweit entlade, bis sie sich selbst sicherheitsabschaltet. Um 1450 ist dieser Zustand eingetroffen. Der Motor lief also 42 Minuten, was deutlich mehr ist als die geforderten 30 Minuten.
Nach dem Wiederanstecken der Generatorstecker konnte ich den Motor wieder problemlos starten. Das war um 1459. Die Batterie wurde bei 13,6V mit 9,7A bei normalen Verbrauchern (ohne Taxi- bzw. LDG-Lights und Pitot Heat) geladen.
Ich wollte so lange laden, bis der Ladestrom auf 4A fällt und habe wieder bis auf das linke HDX alle Verbraucher ausgeschaltet, um den Ladevorgang zu beschleunigen. Nach etwa 22 Minuten schaltete ich den Motor dann aus. Der Ladestrom war aber nur auf 6,9A gefallen. Dies allerdings bei 13,7V!
Heute habe ich das Dynon Update 17.4 geladen. Anschließend habe ich versucht, nach der Deselection von ADAHRS 201 die Fehlermeldung „NEED USER AOA CAL“ zu provozieren. Diese Meldung ist jetzt nicht mehr erschienen. Das Update hat wohl hier einen Bug behoben.
Einen Rolltest habe ich auch noch durchgeführt um die Qualität der Heading Anzeige zu überprüfen. Es ist wohl so, dass bei 244° nur 240° und bei 64° nur 62° angezeigt werden. Ich habe dann den um 25° falsch angezeigten Heading nach dem Einbau ds Tsi-Fahrwerks jetzt mit dem neuen Fahrwerk in Verbindung gebracht und nicht mehr als einen Defekt der ADAHRSe. Mails mit Dynon und TAF habe dies weitestgehend bestätigt. Die empfohlene Einbauposition der Garmin GMU bei der TSi ist bei Rib 5 etwa in mittiger Höhe. Diese Position ist um einiges weiter vom Fahrwerk entfernt als die ursprünglich empfohlene Einbauposition hinter Rib 4 am Boden für die Sling 2. Den Gedanken, ein zusätzliches Dynon SV-MAG-236 an der neuen Position einzubauen, habe ich verworfen. Der MAG würde zusätzliche 350g wiegen. Beide ADAHRSe wiegen zusammen mit dem Verbindungs-Bracket 450g. Ich werde mir ein Bracket bauen und die ADAHRSe an Rib 5 verschieben.
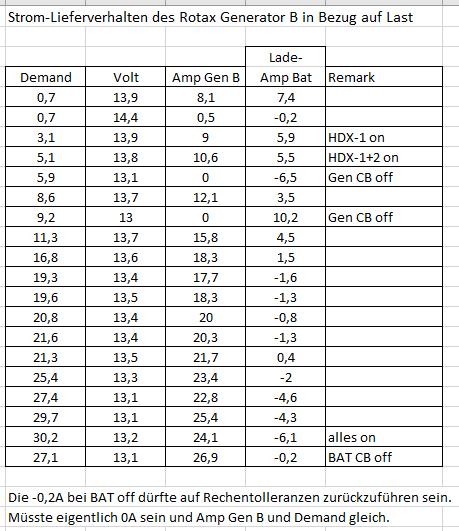
Nachdem ich wieder festgestellt habe, dass bei höherem Amp Demand die Voltage auf unter 13,5 sinkt und dann die Batterie zur Stromversorgung beiträgt, statt weiter geladen zu werden, wollte ich herausfinden, ab welchem Amp-Wert das eintritt. Ich habe dazu alle Verbraucher über das V-PX Menp ausgeschaltet, einschließlich der HDXe, die jetzt von ihrer Backup Bat versorgt wurden. In diesem Zustand lieferte der Generator 14,4 V. Wenn nun Verbraucher zugeschaltet werden und sich ein Demand von über 21 A einstellt, sinkt die Spannung auf unter 13,5 V und ab diesem Zeitpunkt liefert die Batterie Strom ans Bordnetz, statt weiter geladen zu werden. Dies, obwohl der Generator 30 A liefern können müsste. Ich werde hierzu wohl mit Rotax nochmals reden müssen. Möglicherweise gibt es mittlerweile einen an Lithium Batterien angepassten Regulator, nachdem Rotax jetzt selbst die EarthX im Programm führt.