
Das Zurückstellen der Flap Retract Speed war heute das primäre Anliegen. Anschließend sind Ely und ich zur Walhalla geflogen und über Straubing wieder zurück.
Kategorie: Wings
2026-01-15 165. Flug – VP-X Data loaded and new configured
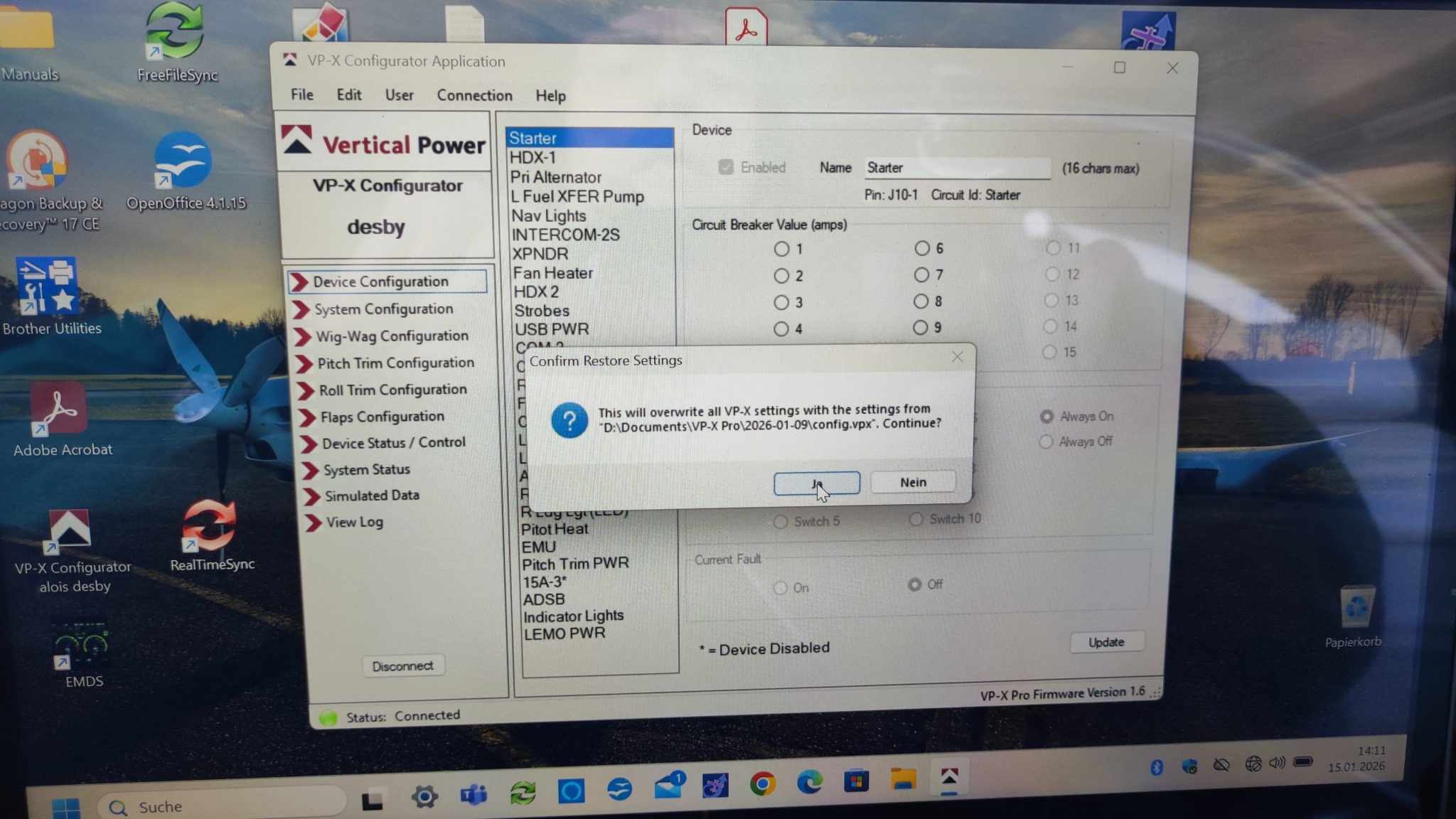
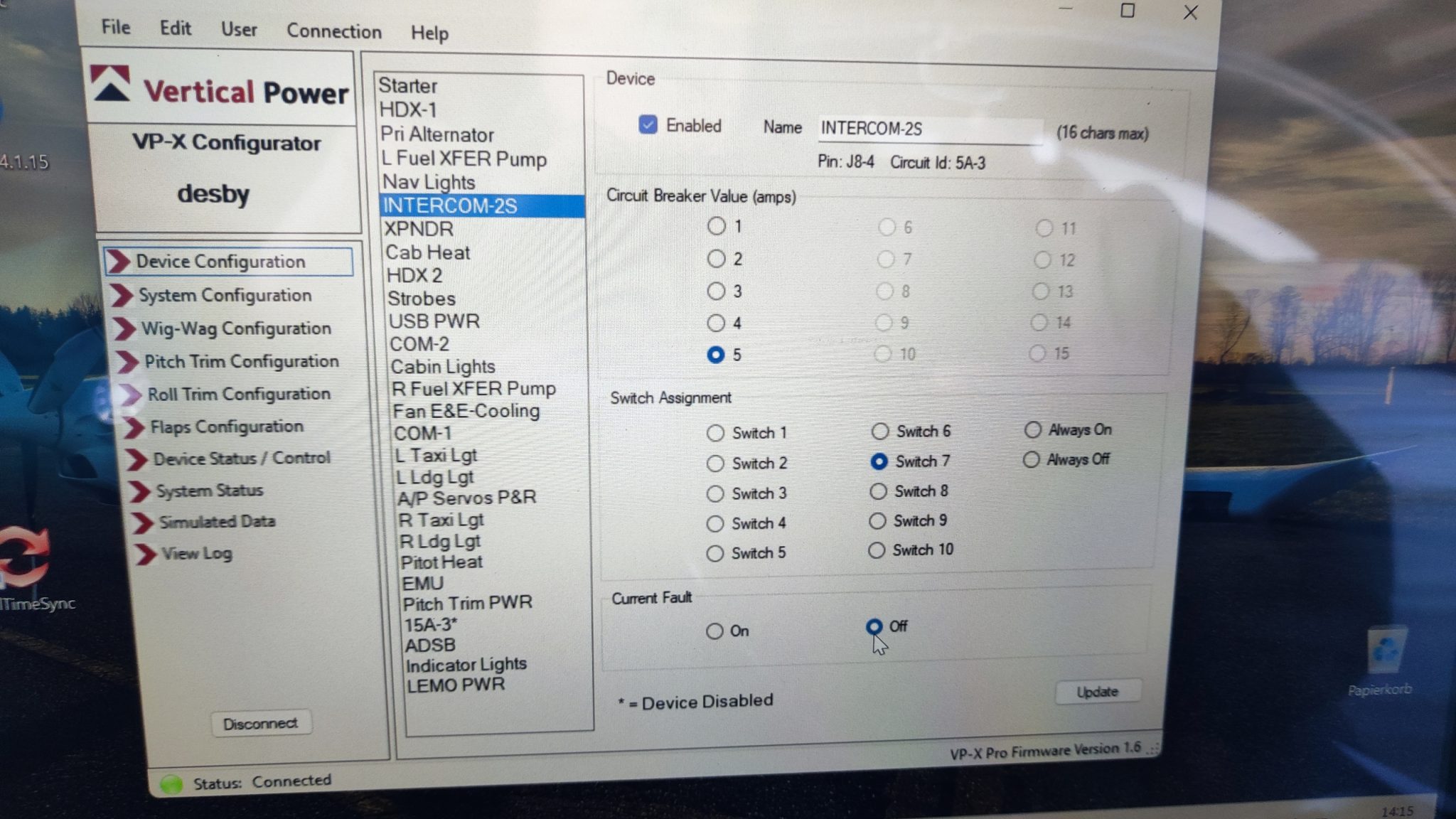
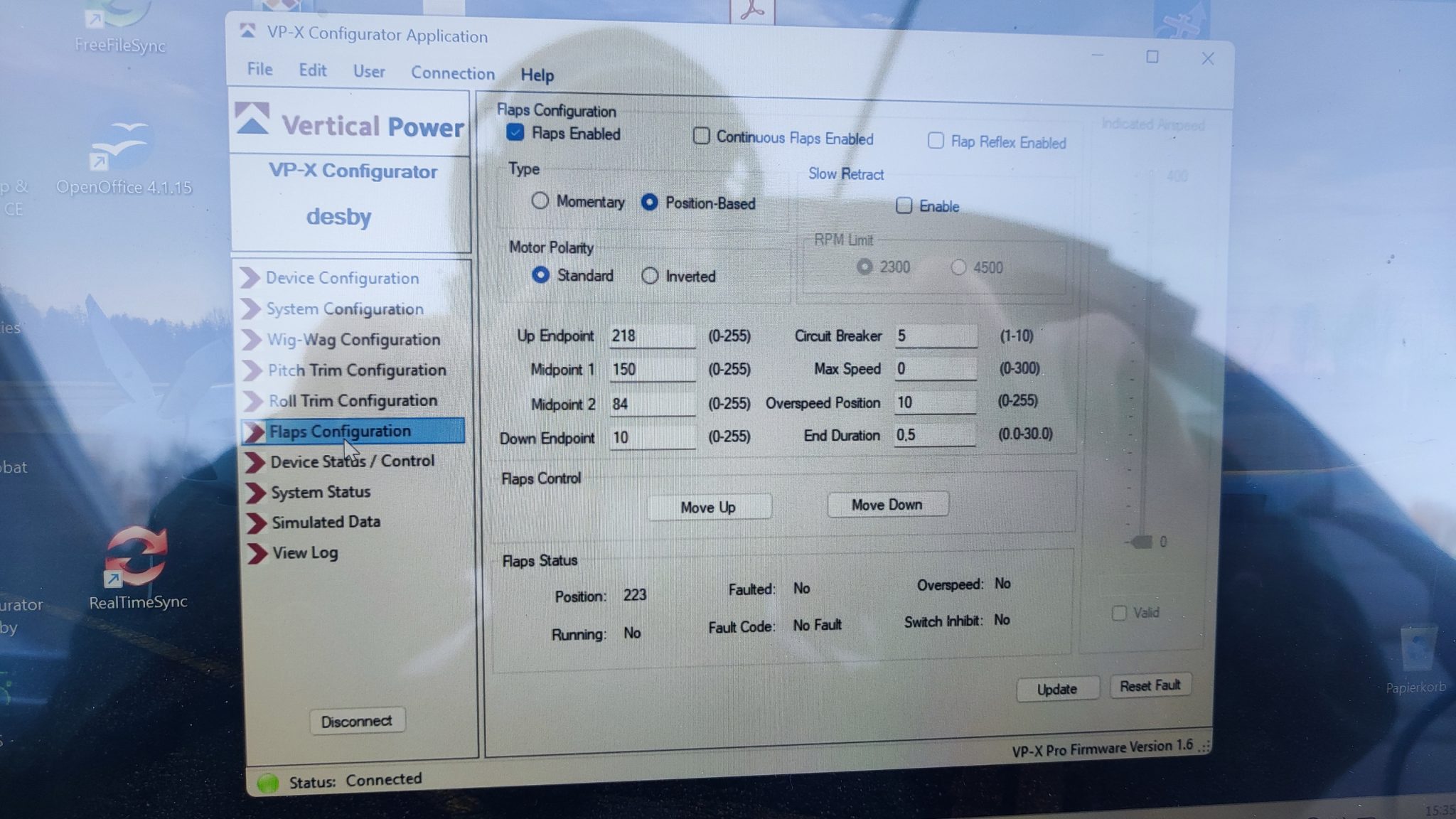
Das Wetter hat heute gepasst. Mit meinem Windows Laptop, dem USB-Netzwerk-Adapter und einem LAN Kabel ausgerüstet, konnte ich die am 10.01.2026 erstellte Konfigurationsdatei in die VP-X laden. Schnell stellte sich heraus, dass das Einschalten der „Current Fault Detection“ bei allen Verbrauchern ein Fehler war. Denn sofort nach dem Laden der Datei erhielt ich diverse Faults angezeigt. Das ging mit den Cabin Lights an, weil diese nicht von der VP-X geschaltet werden, sondern am Sicherungs-Pin J10-7 angeschlossen sind, der „always on“ confguriert ist, damit die Lampen getrennt mit den Schaltern geschaltet werden können. Ist also kein Schalter auf On, so versteht das die VP-X als „durchgebrannte Birne“ und erzeugt die Fault Meldung. Auch andere Verbraucher erzeugten Fehlermeldungen. Diese habe ich dann alle mit dem Konfigurator zurückgestellt auf „No“: ADS-B, Cabin Lights, EMU, Intercom-2, Indicator Lights, XPPDR. Zusätzlich habe ich noch USB-PWR und LEMO-WPR ebenfalls auf „Off“ geschaltet.

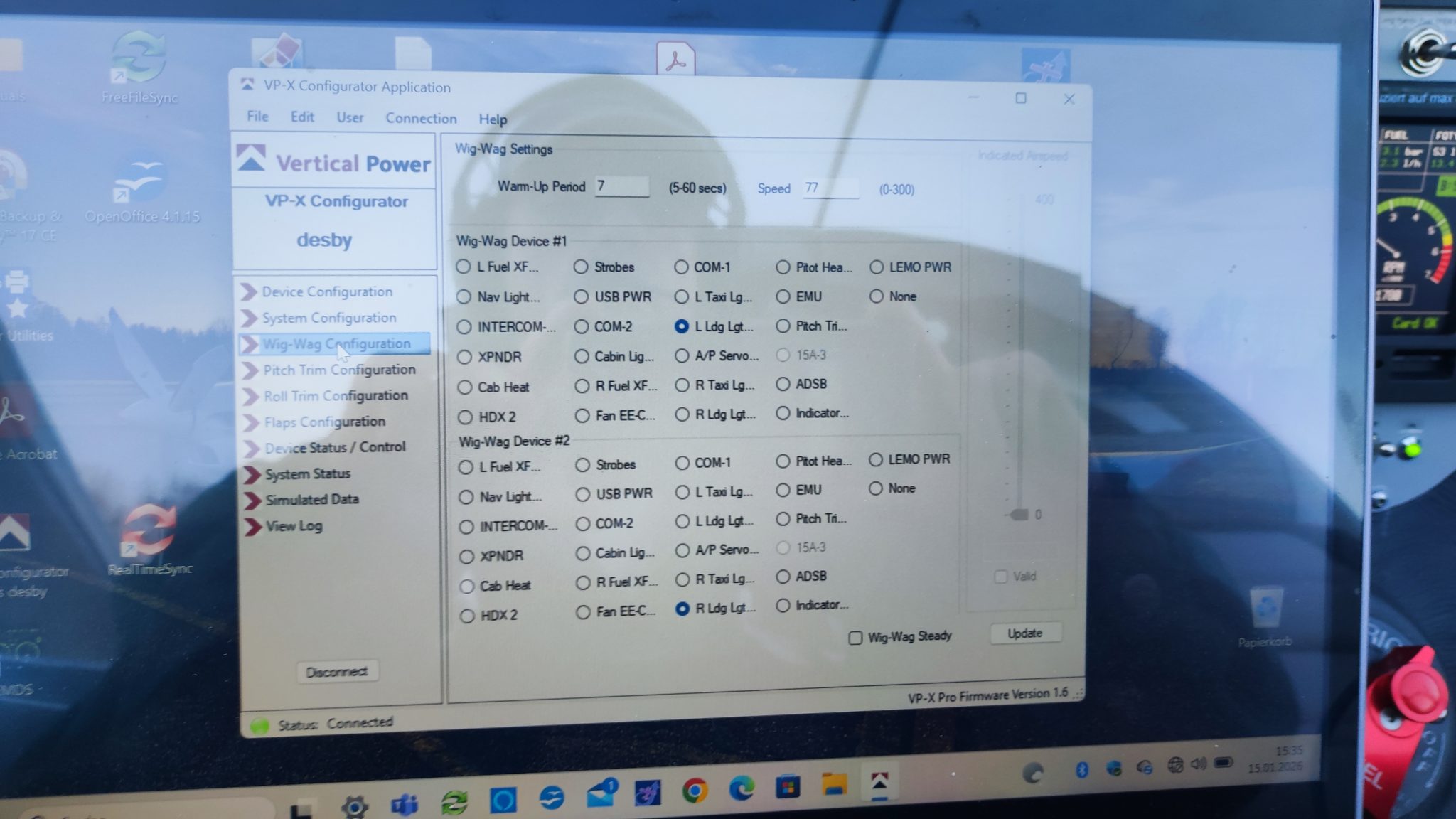
Nachdem diese Einstellungen getätigt waren, habe ich doch eine Platzrunde bei schönstem Sonnenschein gedreht. Dabei ist mir aufgefallen, dass die Flapkonfiguration überschrieben wurde und sich die Flaps nur noch bewegten, wenn ich den Tastschalter gedrückt hielt. Das war für den Flug kein Problem. Nach der Landung habe ich gleich den Konfigurator nochmals geladen und zuerst die Wig-Wag Funktion der LDG-Lights wieder eingeschaltet und anschließend die Flaps reconfiguriert, damit sie per Click auf das nächste Setting fahren und mit einem Click eingefahren werden können. Was ich aber dabei übersehen habe, ist die Konfiguration der Flap Overspeed Warning. Das muss ich nochmals in Angriff nehmen.
2025-08-06 Inspektionsdeckel, Halterung für Bose A20 Bedienteil, weeping Rivet
Die Deckel aller Inspektionsöffnungen mussten auch wieder angebracht werden, was ich heute erledigt habe. Dabei habe ich 3 weeping Rivets am rechten Main Tank festgestellt. Inwieweit ich da etwas unternehme, bzw. unternehmen kann, ist noch offen. Dabei ist anzumerken, dass es sich bei den Tanks um Quickbuilts handelt, die TAF angefertigt hat. Ich hatte bereits Dichtigkeitsprobleme mit dem linken Main Tank 2022-03-09.
TAF hat zurückgeschrieben, dass ich die 3 Nieten ausbohren und mit Chemseal neu einsetzten soll. Das hat aber Zeit



Weiterhin hab ich die schon lange gekauften Halterungen der Bose A20 Bedienungseinheiten angebracht. Ob sie sich bewähren, muss sich noch zeigen. Eines ist schon mal aufgefallen. Anscheinend sind die Halterungen nur für A20 ohne Bluetooth gedacht. Zumindest werden die seitlichen Lautstärketasten von der Halterung verdeckt, möglicherweise aber sogar eingeklemmt. Wahrscheinlich muss ich Aussparungen dafür fräsen.

2024-11-23 Zero Pressure Calibration, Static Line Check, ACF-50 in LH Wing, Static Line Umschalter inside/outside
Die Zero Pressure Calibration war heute gut durchzuführen. Der Hangar blieb zu, die Temperatur war um 14:00 absolut stabil, die Ports und das Pitot war mit Stoff abgedeckt und das Dynon System lief bereits 10 Minuten. Die Calibration selbst war dann schnell erledigt.





Danach habe ich die Maße der Static Ports genommen. Der Außendurchmesser beträgt 25 mm, Der Anschlussdurchmesser 7,5 mm. Der Hintergedanke ist der, dass, wenn ich verschiedene Ringe testen möchte, diese besser mit Schrauben befestigen würde statt sie zu kleben. Hierfür müsste ich M3 Gewinde in den von innen angeklebten Port schneiden.


Danach habe ich ein Umschaltventil in die Static Line gebaut. Mit diesem Ventil kann ich von den Ports auf Kabineninnendruck umschalten.

Jetzt habe ich noch die äußeren 2 Kammern der linken Wing, wo ich meine, dass die hellen Flecken Korrosion sein könnten, mit ACF-50 ausgesprüht.


Zuhause habe ich noch ein 20 cm Verlängerungskabel für den Auxiliary Anschluss der EMU gebaut. Diese Verlängerung enthält keinen 390 Ohm Widerstand. Dieser ist bereits im Anschlusskabel verbaut.
2023-06-30 14. Flug, Flapreparatur 5 Montieren, Rudder Trim Tab auf andere Seite kleben, Elevator Trim o.k.
Die Flap war schnell wieder montiert und ich war neugierig auf das Resultat des Trim Tabs. Schnell stellte ich fest, dass die Kugel jetzt noch mehr auf der linken Seite steht als vorher. Dann ist mir klar geworden, dass ich das Tab auf die falsche Seite geklebt hatte. Das Rudder soll ja eine Kraft erhalten, welche das Rudder nach links drückt! Da habe ich das Tab auf die andere Seite geklebt und wollte gleich nochmal fliegen. Als ich zur Bahn rollte, prangerte eine riesige Regenwolke auf dem Downwind und war schon im Begriff sich auszuregnen. Ich bin auf dem Taxiway umgedreht und habe mich entschlossen, den Testflug heute nicht mehr durchzuführen. Als der Flieger im Hanger war, hat es schon geregnet. Die Elevator Trim Range liegt jetzt viel besser, speziell für den Anflug.

Die Flap sieht wieder gut aus

so wird das Rudder vom Tab im Luftstrom nach links gedrückt

der Seitenwechsel war recht unkompliziert
2023-06-29 Flapreparatur 4 Lackieren, Bracket einnieten, Rudder Trim Tab ankleben, Elevator Trim angepasst
Die 4 Nieten habe ich als erstes ausgebohrt und die ausgestoßenen Mandrels und Nietenreste herausgeholt. Das war recht kompliziert. Mit Tape auf Stäbchen und Greifahle sowie mit Hilfe des Boroskops habe ich alles herausbekommen. Dann kam das Schwierigste, das Bracket einzusetzten. Ich wollte schon aufgeben. Ein letztes Mal wollte ich es noch versuchen, und siehe da, es hat geklappt. Bei dieser Gelegenheit habe ich die Einstellwerte des Elevator Trim Tabs von 9° auf 17° up bezogen auf die Neutralstellung gestellt und von 23° auf 13° down. Nachdem das Bracket vernietet war, habe ich auch diesen Bereich abgeklebt und fürs Primen und Lackieren vorbereitet. Der Primer war, nachdem ich die Spritzpistole wieder zusammengebaut hatte, schnell angerührt und konnte die 1. Lage spritzen. 10 Minuten die 2. Lage. Pistole reinigen, Lack anrühren und nach 35 Minuten nach dem Primer konnte ich lackieren. Vorher habe ich noch die Tapes abgezogen, die den Primerbereich abgedeckt hatten. Der Lack muss ja über die Kante des Primers hinaus gehen. 3 Schichten habe ich lackiert. Wieder Pistole reinigen und schon war der Lack soweit angezogen, dass ich die Tapes abziehen konnte, die die Lackgrenzen bildeten. Jetzt brauchte ich nur noch aufräumen und zum Schluss konnte ich auch die Grobabdeckung noch entfernen. Über Nacht kann der Lack jetzt soweit trocknen, dass ich morgen die Flap wieder anbauen kann. Während der Wartezeit zum Lackieren habe ich noch ein Trim Tab an das Ruder geklebt. Ich bin auf den Testflug gespannt.
die 4 Nieten des Elevators sind bereits grundiert

die Lackschäden an der Winghinterkante habe ich auch gleich lackiert

auch hier sind die Tapes der Grundierung bereits abgezogen

so kann jetzt lackiert werden

das alte Aileron Trim Tab habe ich zu Testzwecken mal ans Rudder geklebt
2023-06-28 Flapreparatur 3 Abkleben und Elevator checken
Was ich gestern nicht mehr geschafft habe, sollte heute erledigt werden. Abkleben und Lackieren sollte machbar sein an einem Tag. Aber zuerst hat mich interessiert, ob die gedachte Modifikation der Verzurreinrichtung so passt oder nicht. Ich habe die 8 mm Bohrungen der Erdanker auf 12 mm aufgebohrt und eine Seite so angepasst, dass die kleinen Schäkel verwendet werden konnten. Ein Spannband konnte ich so einfädeln. Die andere Verbindung erledigt jetzt ein Karabiner zu den Ösen an den Wings und dem Tail. Ein Erfolgserlebnis hat sich also schon eingestellt.

Das neue Konzept

Der Anker kann mit Schlüssel eingedreht werden, ein Schäkel verbindet das Verzurrband und ein Karabiner wird in die Ösen am Flieger eingehängt.
Jetzt habe ich mich ans Abkleben der Flap gemacht. Zuerst grob mit Folie, dann für den Lack. Anschließend habe ich den Lackierbereich mit Aceton gut entfetten und dann weiter für den Primer etwas weiter innen abgeklebt. Nun alles gut abblasen, zum Lackieren positionieren und den Lack anrühren. Glücklicherweise habe ich aber vorher die Spritzpistole durchsprühen wollen. Als ich Verdünnung in den Lackbecher geben wollte, habe ich mich darüber gewundert, warum es im Lackkanal so hell ist. Ich musste feststellen, dass gar kein Düsensatz in der Pistole war. Den habe ich zuletzt ausgebaut und in ein Glas mit Nitro gegeben, um die Lackreste zu entfernen. Die Düse liegt aber jetzt 70 km weit weg zuhause im Keller. Es war bereits 1600 Uhr. Hin und her zu fahren hätte keinen Sinn gemacht.

Die Flap ist zum Primen und Lackieren vorbereitet

Die beschädigte Lack-Kante der Wing lackiere ich gleich mit

Dummerweise fehlt die Düse in der Spritzpistole
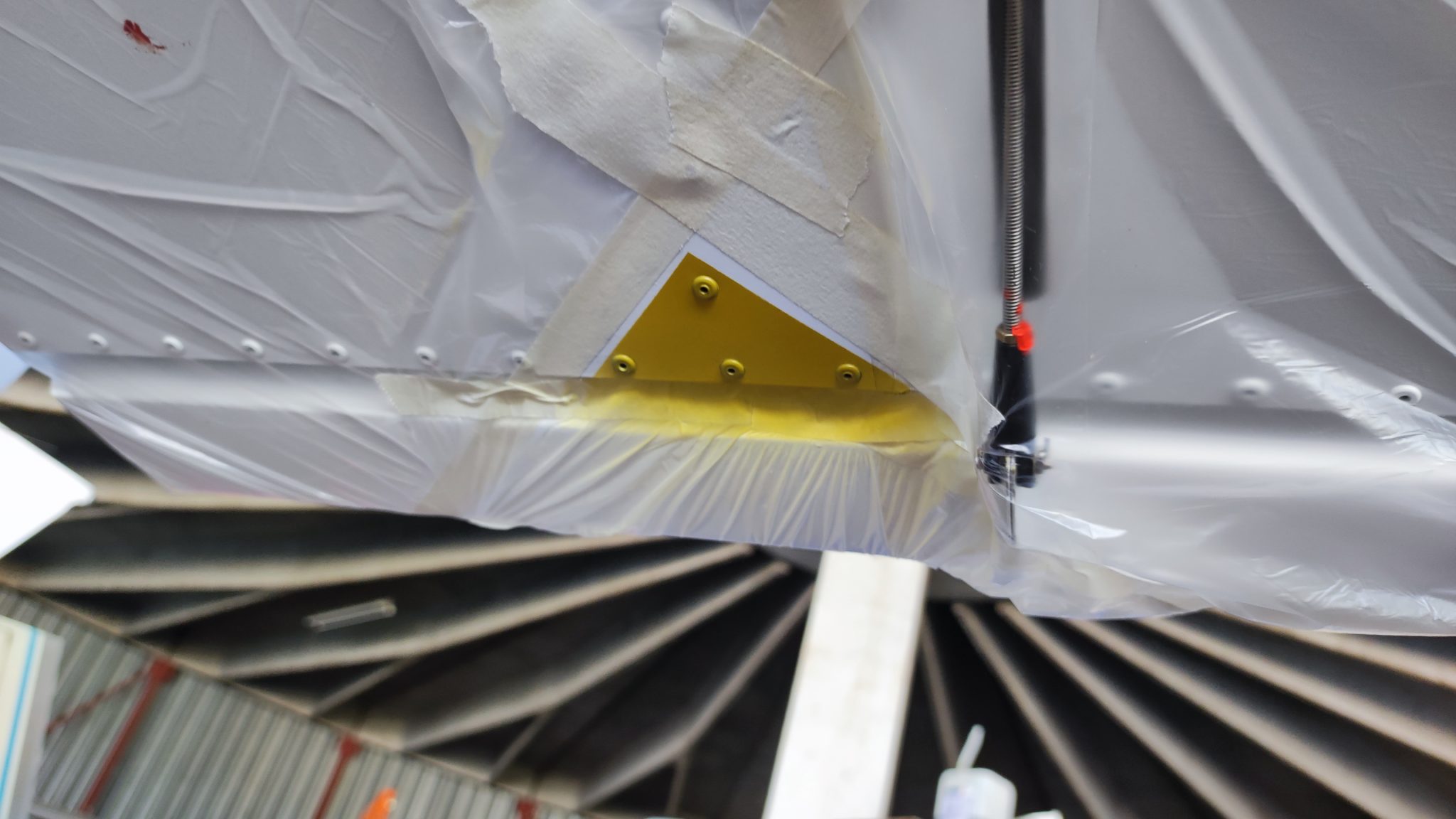
Mir ist wieder eingefallen, dass ich beim letzten Outside Check festgestellt habe, dass im Elevator auf der linken Seite etwas rutscht, wenn man den Elevator hoch hebt. Ich hatte schon die Befürchtung, einen Schraubenschlüssel oder ähnliches vergessen zu haben. Das Rutsch-Geräusch kam aber nicht aus dem Bereich wo der Trim Motor verschraubt ist, sondern daneben zum Seitenruder hin. Ich habe die 6 mm Löcher der Innenrippe auf 10 mm aufgebohrt um mit meinem Endoskop hineinschauen zu können. Später habe ich festgestellt, dass ich das auch durch das Scharnier und der Löcher im Spant hätte machen können. Die Suche war sehr diffizil. Letztlich habe ich doch gefunden, was da hin und her rutscht. Es ist ein Verstärkungsteil, welches wohl, als es noch mit einem oder zwei Clecos gehalten wurde, durch das Einsetzten der Niete nach unten gedrückt wurde und beim Herausnehmen des Clecos, um auch da zu Nieten ganz abgefallen ist. So hat sich das Vergessen der Spritzpistolen-Düse als sinnvoll herausgestellt. Wenn ich morgen die 4 Nieten ausbohre und das Verstärkungsteil einsetze, kann ich auch diese Nieten gleich mit lackieren, wenn die Flap lackiert wird. Auch habe ich die Abschlusskante der rechten Wing mit abgeklebt, um auch da schon vorhandene Lackschäden ausbessern zu können. So hat einmal ein Missgeschick auch etwas gutes gehabt. Sonst hätte ich später nochmal mit Lackieren anfangen müssen.

Mein Endoskop oder heißt das Boroskop?
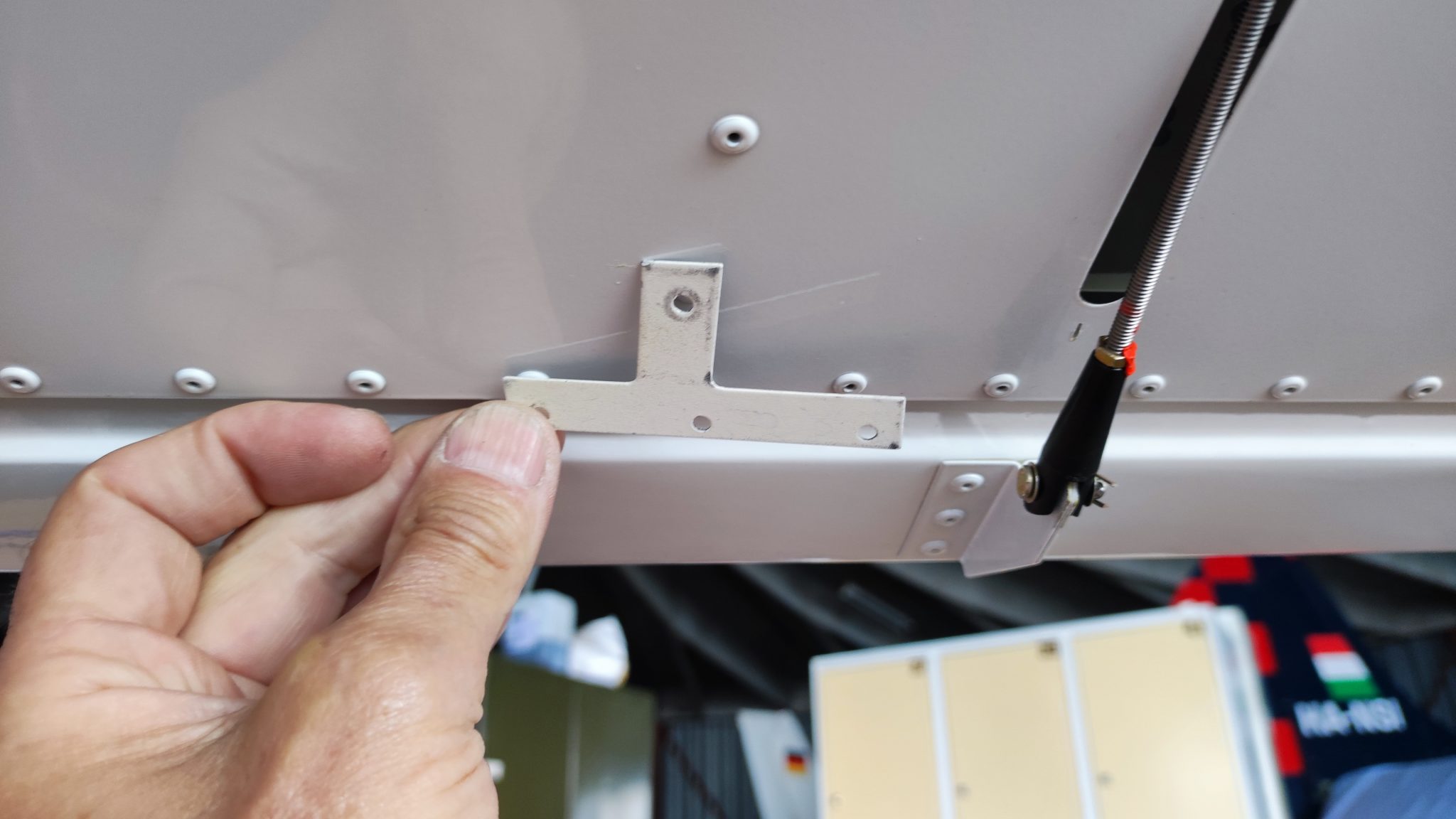
Dieses Teil ist im Elevator herum gerutscht
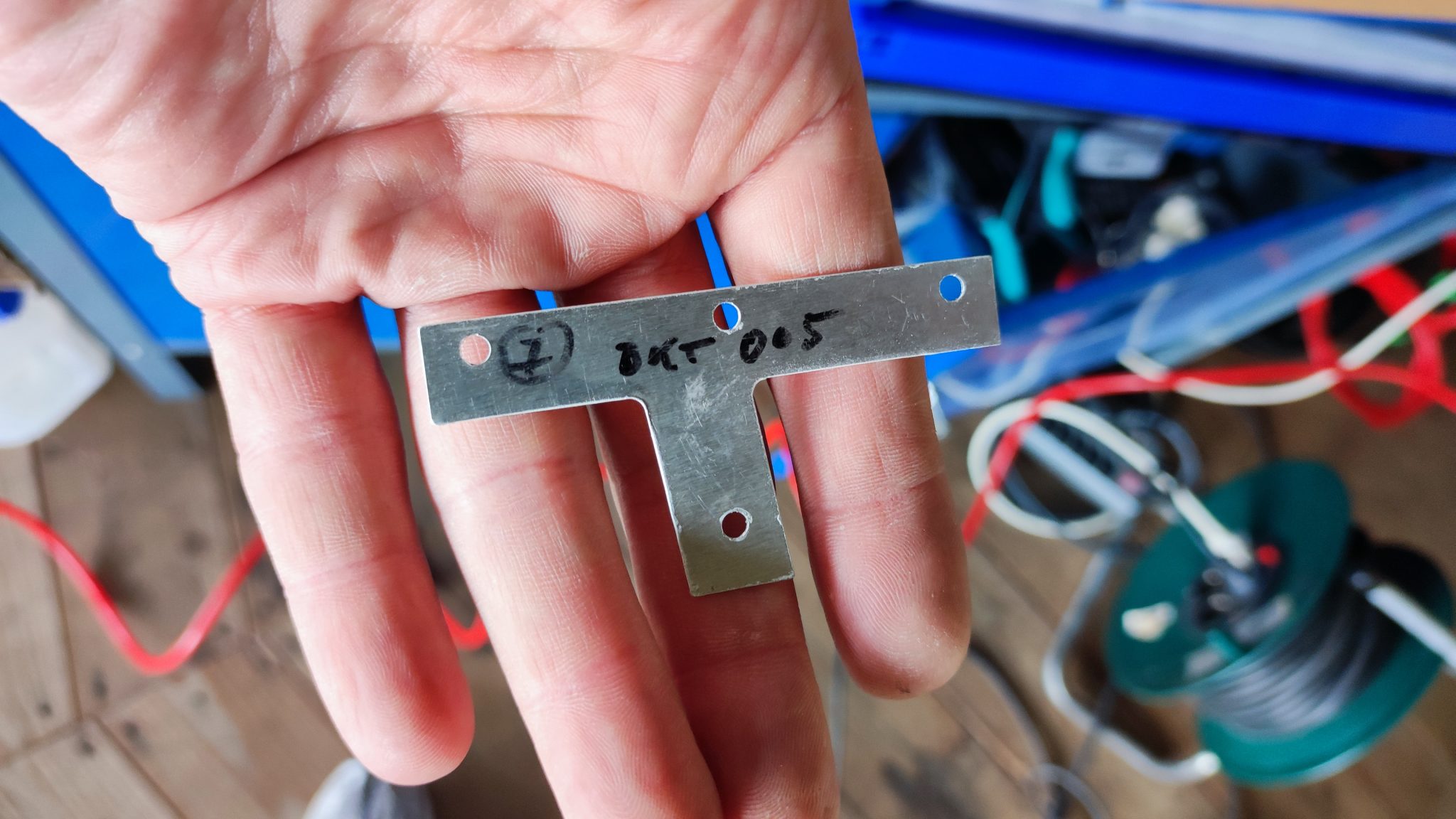
Es ist das Bracket 005 mit der Nr. 7 in der Zeichnung
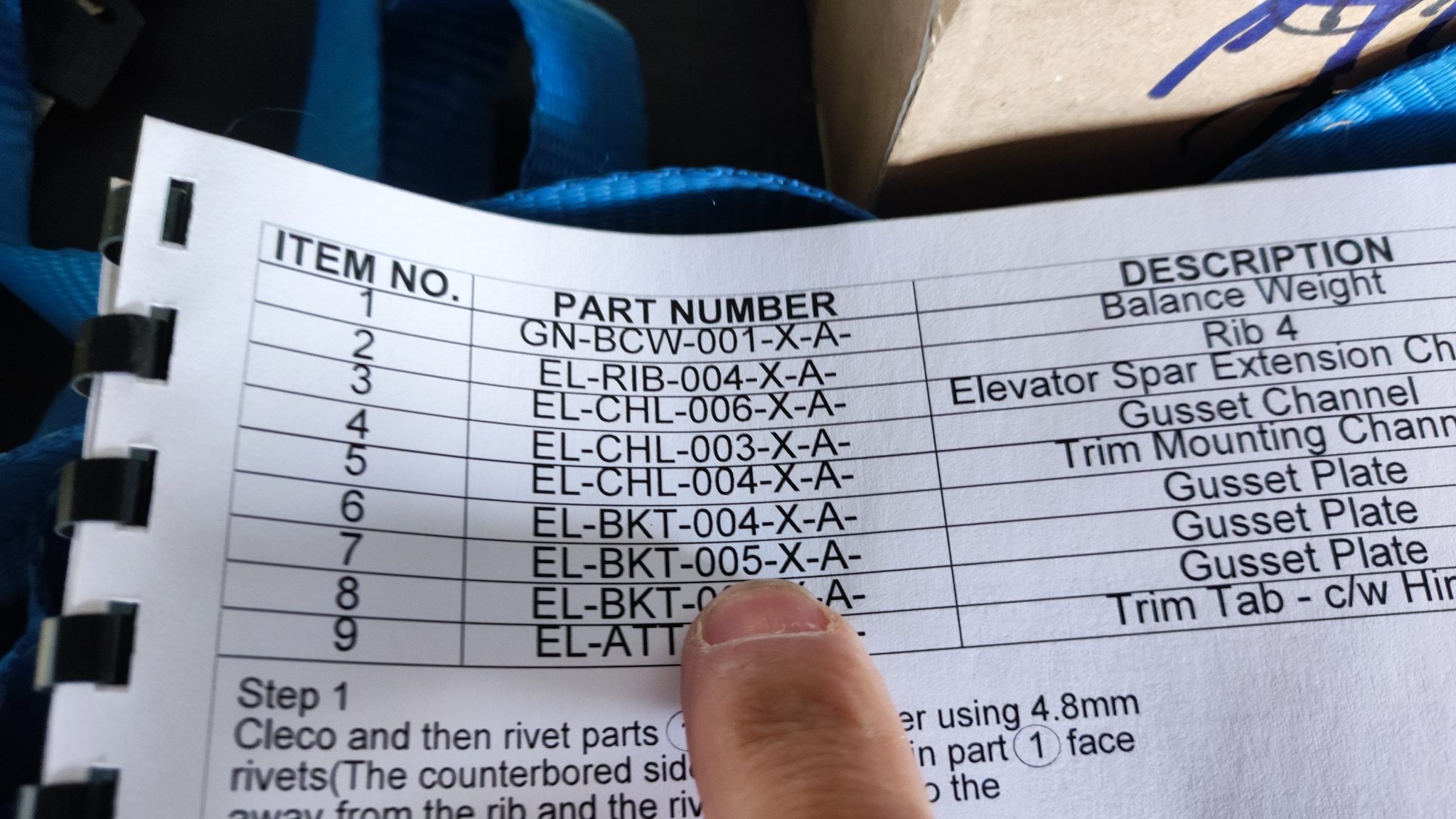
Item No. 7 EL-BKT-005-X-A- Gusset Plate
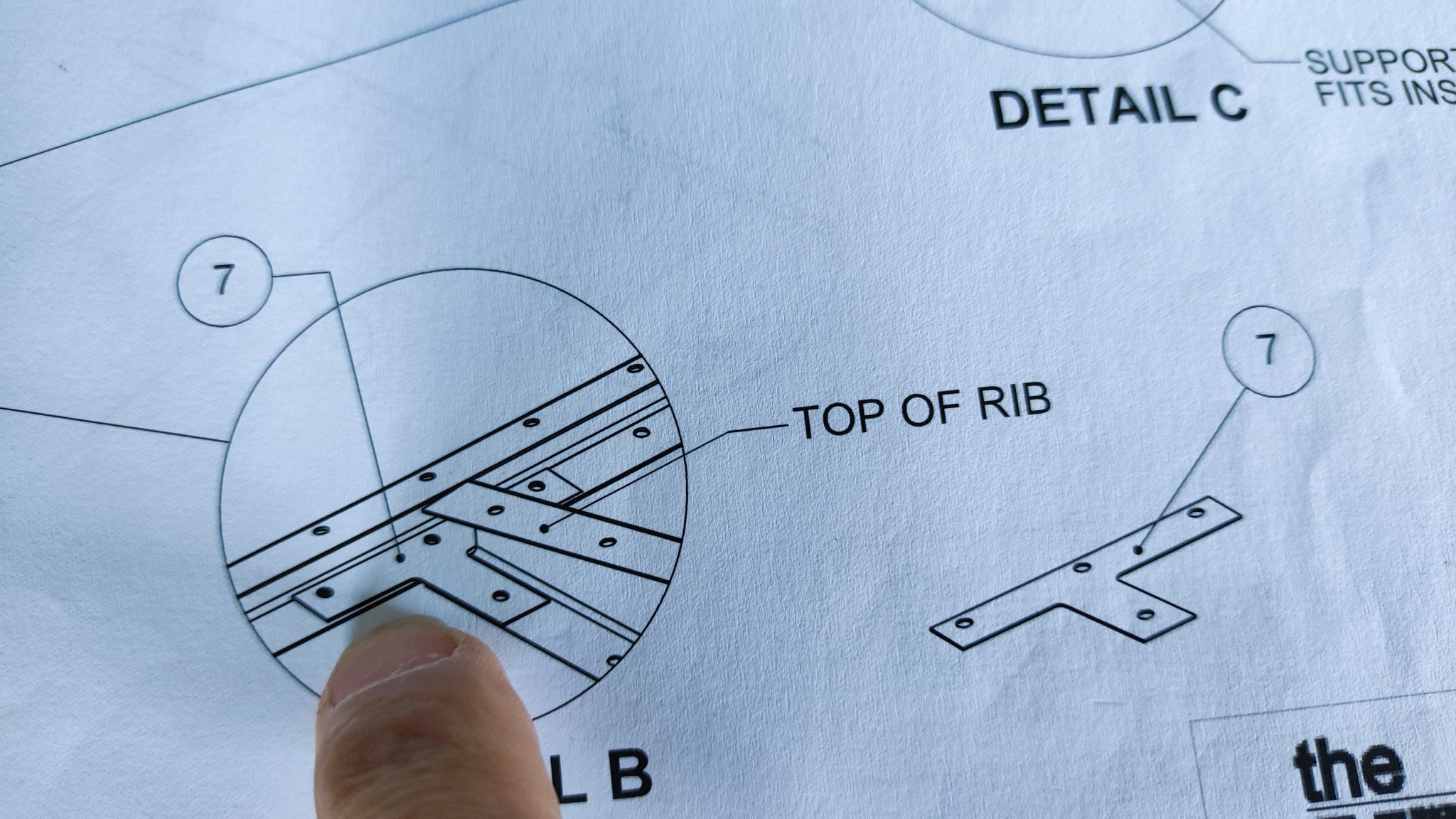
ein Verstärkungsstück bei der unteren Verbindung zwischen Rippe und Abschlusskante im Trim Tab Bereich
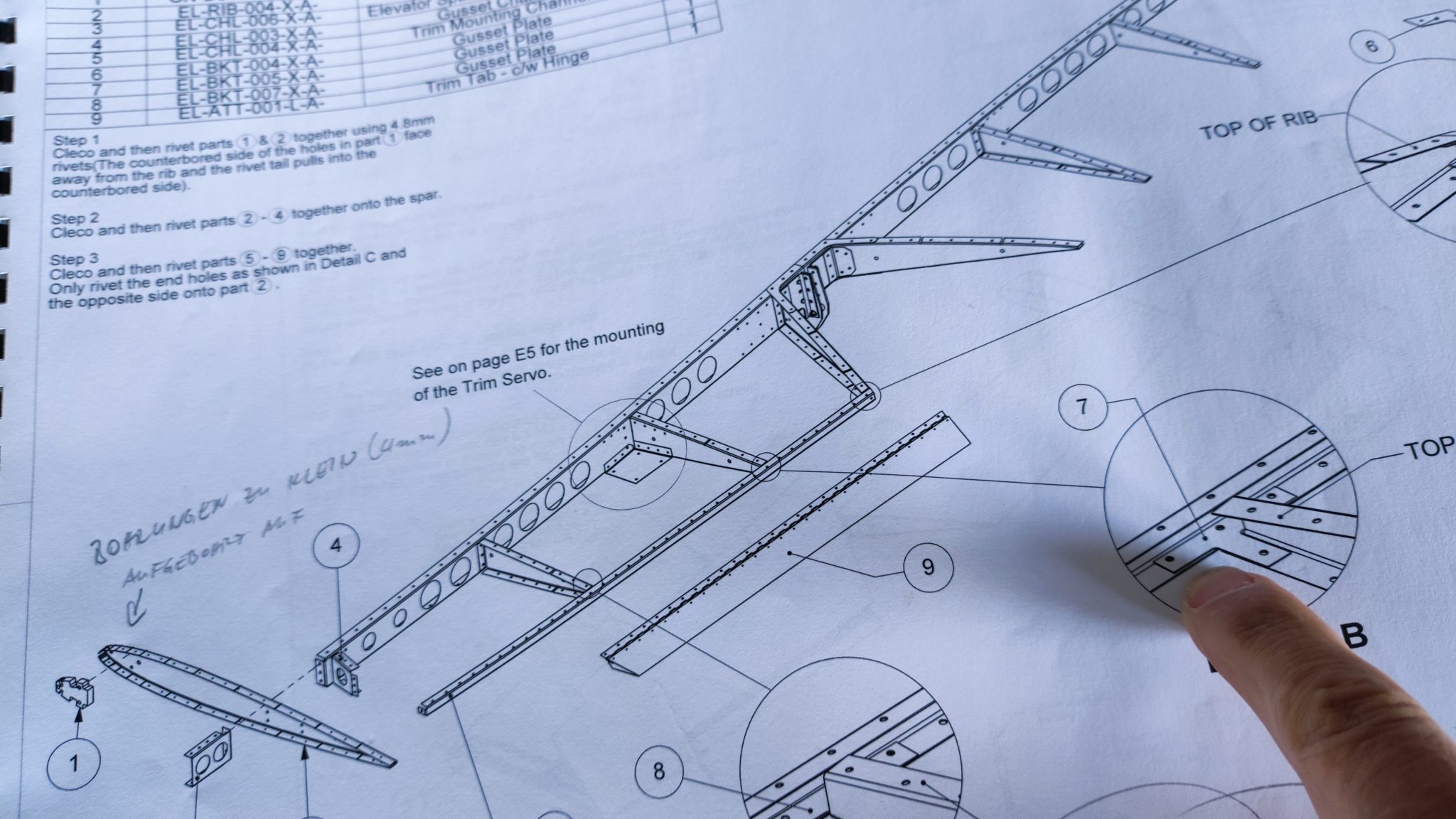
zur Orientierung
2023-06-27 Flapreparatur 2 wieder zusammennieten
Ich dachte, ich käme heute sogar noch zum Lackieren. Aber bis ich das ganze Werkzeug und die Materialien zusammengesucht hatte, ist schon eine Menge Zeit vergangen. Ich musste als erstes die Nietbereiche von Lackresten befreien. Dann konnte ich die Clecos setzen und anfangen zuzunieten. Das Lackieren kommt dann morgen.

nur noch wenige Nieten, dann ist die Flap wieder zu
2023-06-26 Flapreparatur 1 ausbauen, ausnieten, ausrichten
Die Flap war schnell ausgebaut, die Nietenmandrells herausgestoßen und die Nieten ausgebohrt. Mit Abstandshaltern konnte ich die Flap in aufgeklapptem Zustand offen halten und das Ausrichten mit einem Gummihammer und einem Eisenhammer versuchen. Mit dem abgerundeten Eisenhammer habe ich innen dagegen gehalten und von Außen mit dem Gummihammer geklopft. Ich war nicht sonderlich mit meiner Arbeit zufrieden und habe Wolfi ein Bild geschickt, ob da noch mehr möglich wäre. Er hat mich glücklicherweise gleich eingeladen und bin natürlich sofort mit der Flap zu ihm gefahren. 1 ½ Stunden hat er an der Flap hingearbeitet und mit filigransten Schlägen ein echtes Wunder vollbracht. Es ist zwar bei genauerem Hinsehen noch festzustellen, dass da mal etwas gewesen sein muss. Aber vielleicht kann ich mit einem passendem Aufkleber die Stelle noch etwas kaschieren.

besser habe ich es nicht hinbekommen.

Dann habe ich Wolfi zurategezogen

Kunst kommt von Können, oder umgekehrt? Ein Künstler ist er!!!

Jetzt geht’s zurück zum Flieger
2023-06-14 Aileron Trim Tab fixed, Rudder Cable Stops adjusted
Heute habe ich ein neues Aileron Trim Tab gemacht, lackiert und montiert. Es ist jetzt 16 cm breit.

Aileron Trim ist damit abgeschlossen
Ich will herausfinden, ob die Justierung der Rudder Cable Stops eine Auswirkung auf das Rollverhalten hat, bei dem ich immer etwas rechtes Ruder geben muss und auch im Flug, wobei ich bei Reisegeschwindigkeit ebenfalls leicht rechtes Ruder geben muss, um die Kugel mittig zu halten. Ich habe hierfür das Nosegear mit der Schleppstange etwas nach rechts ausgelenkt und mit einem Stein Fixiert. Das Ruder steht dabei etwas nach rechts. Jetzt habe ich die Stops gelockert und an die neue Position der Rudder Cable gerückt und wieder fest geschraubt. Zum Testflug bin ich nicht mehr gekommen. Ich lasse mich überraschen.

das ausgelenkte Nosegear

das somit ebenfalls ausgelenkte Rudder

die Cable Stops in ihrer neuen Position