Warum erst jetzt die Auswertung und Berechnung der Startstrecken erfolgt, lag an meiner Abwesenheit, die durch eine Urlaubsreise begründet ist. Die Daten sind fertig und ich habe sie an Dominik geschickt, damit er mir Tabellen fürs Flughandbuch erstellt um auch da zum Ende zu kommen.
Nachdem ich bei den Flügen 135 bis 140 zur Ermittlung der Startstrecken Vy bei 50′ geflogen bin statt 1,3xVs, mussten diese Flüge wiederholt werden. 8 Runden habe ich gedreht und nach dem letzten Start habe ich noch eine ADAHRS AOA Calibration durchgeführt. Bisher gab es nur 1 Konfiguration (clean) zu kalibrieren. Seit dem letzten Update von Dynon auf 17.1 gibt es die Möglichkeit auch verschiedene Klappenstellungen zu kalibrieren. Diese Kalibrierung habe ich heute versucht. Allerdings war das Wetter nicht ideal dafür. Somit muss ich die Kalibrierung wiederholen. Es war aber ein gutes Training.
Mir erschien es zu stressig an einem Tag 2 3 1/5 Stunden-Flüge zu machen und zusätzlich 8 Messrunden. Deshalb bin ich heute schon zusammen mit Ely nach Rotenburg Wümme geflogen. Eine Nacht im Hotel hat ja auch was schönes. Das Wetter war bestens. Bei dieser Gelegenheit habe ich wieder einen XPNDR Flight Check mit Langen Info gemacht.
Der Ausbau der Fahrwerksfeder war unkomplizierter als ich dachte. Die Materialien, die ich zum Aufbocken mitgebracht hatte, waren ausreichend.
Als nächstes habe ich die Räder und danach die Achsen abgebaut. Hierfür musste auch der Bremssattel aufgeschraubt werden.
Bei dieser Gelegenheit habe ich einen Defekt der inneren Lagerabdeckung gefunden.
Letztlich war alles von der Feder entfernt. Die andere Seite war etwas anders, weil ich den Unterbau für die Wing anders positioniert hatte, weil ich das Pitot frei halten wollte. Der Ausbau war aber ebenfalls unkompliziert. Die Bolzen der Fahrwerksfeder ließen sich recht einfach herausdrehen.
An der Feder konnte ich keine weiteren Schäden finden. Die Maße decken sich aber genau mit denen der TSI-Feder. Der obere Lochabstand ist 100,3 cm, der untere 94 cm. Die Breite der Feder ist 12,8 cm. Die Abstände der Bohrungen für die Achsen sind alle 3,5 cm. Die Gesamtbreite der Feder ist 177,5 cm und die Höhe 56,8 cm. Somit passt eine TSI-Feder in meine Sling 2! Die Dicke der Feder variiert bei den Achsen zwischen 26 und 28 mm. In der Mitte sind es 35 mm.
Die Sitze sind ausgebaut, ebenso die Verkleidungen zum Unterboden entfernt. Die Muttern der Fahrwerksbolzen sind abgeschraubt. Außerhalb des Cockpits sind die Spats abgebaut, die Bremsleitungen getrennt und das Abdeckblech ausgenietet. Als nächstes ist das Aufbocken des Fliegers am Plan. Die dafür notwendigen Utensilien sind hergerichtet.
Dirk in Laupheim baut momentan eine Sling TSI und hat auch das Undercarriage Kit bereits in seiner Werkstatt. Dort konnte ich mir die Schwinge genauer anschauen und einige Maße nehmen. Der 1. Eindruck sagt mir, dass es wohl möglich sein müsste, diese Schwinge in meine Sling 2 einzubauen. Damit wäre mein Fahrwerksproblem lösbar. Weitere Recherchen sind aber noch nötig. An dieser Stelle herzlichen Dank an Dirk, der mir diese sehr herzliche Unterstützung gewährt hat.
Die Anzeige über den 3° Descent Pass beim Anflug wollte bisher nicht recht funktionieren. Im Konfigurationsmenü steht, man soll die Altitude eingeben. Das ist aber falsch. Der Dynon User Guide ist mittlerweile aktualisiert und spricht von Hight. Bei Distance to Runway 0, Hight 50′ und 3° wird die Ablage recht gut angezeigt. Die Werte für den Flugplatz habe ich mit 5 NM, 1500′ und 3° eingetragen.
Ich hatte testweise Reifenventil Sensoren von TireMoni installiert gehabt. Diese sendeten Druck und Temperatur Signale an einen Kollektor, der mit USB-Strom versorgt werden musste. Dieser Kollektor sendete die gesammelten Daten an die TireMoni App auf dem iPad oder das Android Handy weiter, wo die Werte angezeigt wurden. Beim Verlassen der vorher programmierten Spannen, wurde eine Warnung ausgegeben. Es stellte sich aber heraus, dass es ungünstig ist, zuerst Strom auf den Flieger zu geben, um den Reifendruck ablesen zu können. Weiter ist wohl die Rate, mit der die Abfragen getätigt werden sehr gering. So dauerte es manchmal 5 Minuten, bis aktuelle Daten in der App angezeigt wurden. Von Wolfgang habe ich vom System FOBO BIKE 2 FOR TRIKE erfahren und es mir für etwa 150 € sofort besorgt. Heute habe ich es installiert. Es funktioniert ohne Kollektor und ohne Stromversorgung. Deshalb kann die Prüfung bei einem stromlosen Flugzeug durchgeführt werden. Rufe ich die App auf, werden auch sofort aktuelle Daten angezeigt. Eine Warnung bei Über- oder Unterschreitung des programmierbaren Wertebereichs wird ebenfalls ausgegeben. Von großem Vorteil ist bei FOBO BIKE auch die Batterieanzeige der Sensoren. Sind die Sensoren in einer FOBO App installiert, z. B. auf dem Handy mit Android, man braucht hierfür ein Konto, welches aber nichts kostet, sind sie nach der App Installation auf dem iPad und nach Anmeldung im Konto ebenfalls schon installiert. Das ist recht bequem.
Mir ist aufgefallen, dass bei einer AOT von z.B. 5°C die in der EMU angezeigte Ambient Temp sowie die Manifold Air Temperatur (MAT) mit 13°C angezeigt wird, also 8° höher liegt. Ich vermutete eine Aufheizung der Ansaugluft auf dem Weg durch den Ansaugkanal und dem Filtergehäuse. Ich habe heute den Ansaugschlauch wärmeisoliert. Der Unterschied ist nicht sehr groß. Die Ambient Temp wurde heute nur 7° und die MAT mit 6° höher angezeigt. Es geht also wenigstens in die richtige Richtung.
Nachdem ich meine EasyVFR Database auf den neuesten Stand gebracht hatte, änderte ich noch den Schwellenwert für die Fuel XFER Pressure Anzeige für den Warnbereich von 0,2 auf 0,3 Bar. Jetzt funktioniert die Ausgabe der Warnung einwandfrei.
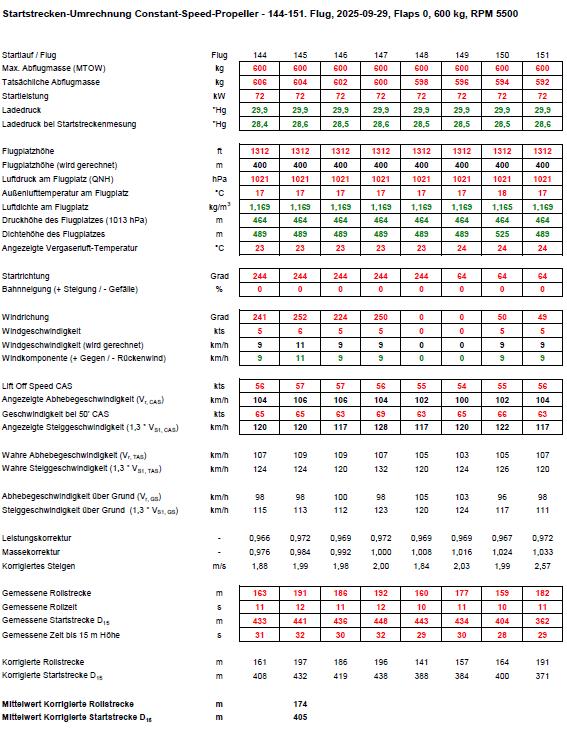
Jetzt waren alle Vorbereitungen abgeschlossen um die TO-Performance für 700 kg und 5500 RPM zu erfliegen. Wenn die Lärmmessung bei 750 kg und 5500 RPM positiv ausgeht, brauche ich auch Werte für 700 kg und 5500 RPM, weil, wenn ich die RPM auf 5500 reduziere, dann generell. Die Berechnungen erfolgen an einem anderen Tag.
Mit der geringeren Tankanzeige von 74 l gerechnet hatte ich immer noch 10 l Extra Fuel für den Rückflug an Bord. Ein Nachtanken wäre sowieso nicht möglich gewesen, höchstens eine Zwischenlandung. Ich wollte aber speziell auch die Genauigkeit der Treibstoffkalkulation in Erfahrung bringen. Ich habe deshalb den über den Fuel Flow gerechneten Restflug vor dem Abflug nicht an die Tankanzeigen-Menge angepasst. Es ergab sich dann ein Gesamt-Mehrverbrauch beider Flüge von 14 %. Von 130 l hätte ich über Fuel Flow gerechnet noch 29 l in den Tanks haben müssen. Die Tankanzeige zeigt aber nur noch 15 l an, also eine Differenz von 14 l. Von einem Gesamtverbrauch von gerechneten 100 l sind 14 l ein Mehrverbrauch von 14 %. Das ist der gleiche Wert, wie schon beim vorherigen Flug 117 berechnet. Möglicherweise gibt es da eine Möglichkeit der Kalibrierung.
Die Kontrolle der Fahrwerksfeder ergab keine Veränderung bei den Rissen.
Eine positive Sache ist noch, dass es mir jetzt endlich gelungen ist, eine nutzbare Stromversorgung für die Handycam zu installieren. Ich habe ein Akku gefunden, das einen USB-C-Anschluss hat. Liegt hier Strom an, wird das Akku nicht angezapft. Endlich ein Durchbruch. Bei der Actioncam ist es so, dass das Akku trotz Stromanschluss aufgebraucht wird, die Cam aber dann mit dem zugeführten USB-Strom am Leben gehalten wird. Dummerweise ist mir aber bei der Actioncam diesmal die Speicherkarte beim vorherigen Flug voll geworden, ohne dass ich es bemerkt habe. Die Speicherkarte der Handycam war auch voll. Das habe ich aber rechtzeitig bemerkt und konnte in Mirow eine neue kaufen.
Durch die Übernachtung bin ich auf ein weiteres Problem gestoßen. Ich hatte keine Möglichkeit das Flight Log von EasyVFR auszudrucken um es im Flug führen zu können. Ich habe mir jetzt einen mobilen Thermodrucker gekauft. Mit diesem Phomemo M834 zu € 120 habe ich dieses Problem gelöst. Er wiegt mit Transportkistchen und voller Papierrolle 1 kg. Das ist akzeptabel.
Ich wollte endlich einen längeren Flug durchführen. Deshalb habe ich mich für einen 3-Stunden-Flug nach EDAX, Müritz Airpark, entschieden. Mit dem Dipstik habe ich die Füllmengen der Main Tanks bestimmt und die nötige Menge nachgetankt. Wir sind dann mit 130 l Mogas in den Tanks gestartet, was Sprit für Hin- und Rückflug plus Reserve und 20 l Extra bedeutete. Über ganz Europa war stabiles Hochdruckwetter, sodass wir beruhigt übernachten konnten. Mir ist dabei aufgefallen, dass die verbliebene Tankmenge nach den Tankuhren gerechnet mit 74 l um 6 l weniger war, als nach der Kalkulation über den Fuel Flow, der von Dynon mit 79,6 l angezeigt wurde. Das ergibt einen Mehrverbrauch von 14 %! Bei diesem Flug habe ich mit Langen Info um 12:18 GMT einen XPNDR Check durchgeführt. Alles o.k.!