Während ich den Gegenwindeinfluss bei 700 kg und 650 kg mit einer Beladung von 2 Piloten zusammen 150 kg und 20 kg Gepäck erstellt habe, habe ich die 600 kg sowie 550 kg Daten nur mit 1 Piloten mit 80 kg ohne Gepäck gerechnet, da nur bedingt betankt werden kann.
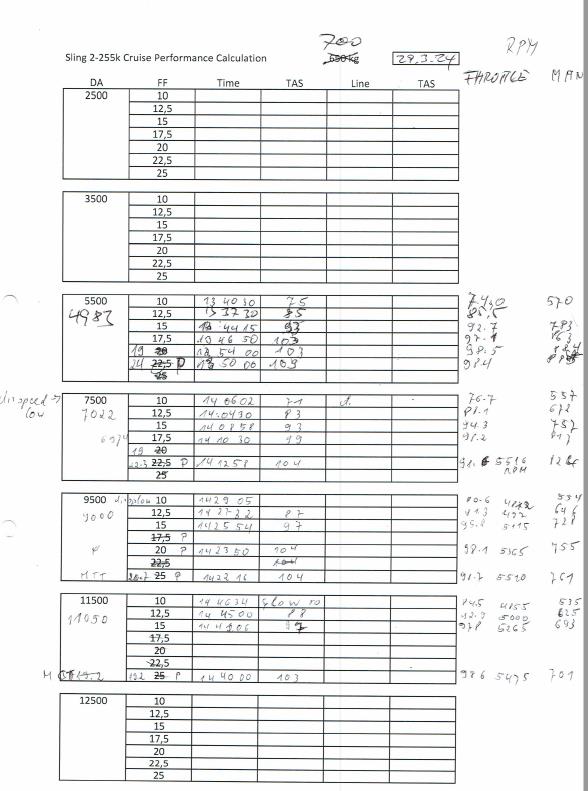
Endlich habe ich die Auswertung der Cruise-Performance Daten fertigstellen können. Dank gebührt dabei Peter, der mir wieder mit der Erstellung der Excel Diagramme unter die Arme gegriffen hat.
Für mich überraschend war, dass die größte Reichweite bei niedrigster Geschwindigkeit mit einem Fuel Flow von 10 l/h erreicht wird. Das ist sogar bis zu einem Gegenwind von 40 Knoten der Fall. Erst bei 50 oder 60 Knoten hat man die maximale Reichweite bei einem Fuel Flow von 15 bzw. 17,5 l/h. Die Höhe spielt dabei auch eine untergeordnete Rolle. So hat man wohl den besten Fluggenuss bei einem Fuel Flow von 15 l/h in einer Höhe um die 5000′. Dort ist auch eine gewisse Sicherheits-Marge für einen eventuellen Gleitflug enthalten.
Nachdem ich so im Tabellen-Flow war, habe ich auch gleich die Daten vom 46. Flug mit 650 kg verarbeitet. So sieht das Ergebnis aus.
Heute wollte ich final die Daten für die T/O-Performance bei MTOW erfliegen. Im Nachhinein musste ich feststellen, dass ich mit den Geschwindigkeitsbezeichnungen ein Problem hatte. Im Erprobungsmanual stand „Best Climb Speed“ wobei auf eine andere Seite Bezug genommen wurde, die ich aber nicht gelesen hatte. Denn dort stand 1,3xVs1. Vs1 bedeutet „die Geschwindigkeit in der jeweiligen Konfiguration“. Das kann also alles sein. Stall Speed in Clean Configuration, Landing Configuration, Flaps 1, oder Flaps 2. Ich habe jedenfalls fälschlicherweise meine T/Os versucht so zu fliegen, dass ich in 50′ Best Climb Speed, also Vy habe, oder anders gesagt, 65 kts. Das ist aber viel zu viel. Denn 1,3xVs, weil ich in Clean Configuration meine Starts durchgeführt habe, entspricht 61 kts. Möglicherweise muss ich diese Datensammlung nochmals erfliegen.
Die Berechnung der Cruise Performance habe ich am 07.05.2024 durchgeführt, zusammen mit den Daten vom 46. Flug mit 650 kg. Die Berechnung der Climb Performance machte ich am 09.05.2024. Diese Daten waren der Ausgangspunkt für die Berechnungen:
Den Fragebogen der OUV für den „Fluglageregler“ habe ich wie folgt komplettiert:
Gestern habe ich die neue EMU-Software SL02.01 geladen, die einen Prop-Test integriert hat, mit dem die Ölzirkulation des Governors vor dem T/O hergestellt wird. Leider hatte ich bei einem Startversuch sofort eine Lane A Fehlermeldung erhalten:
„Crank Bias Positive A und Crank Bias Negative A als ECUA Sensor Faults Lane A“
Die Recherche darüber ergab, dass es wohl ein Problem mit einem Crank Shaft Position Sensor (CP1 oder CP2) gab. Hans B von Rotax hat mir geraten, die Widerstände beider Sensoren zu messen. Diese sollten einigermaßen gleich sein, was ich mit meiner Messung bestätigen konnte. Ich stellte aber fest, dass das Wiring nicht optimal verlegt war. Es könnten Spannungen aufgetreten sein. Deshalb habe ich nach der Messung die Kabel etwas anders befestigt, als es vorher der Fall war. Die Fehlermeldung ist danach nicht mehr aufgetreten.
Lane A ist wieder o.k.! Beide Lanes in „Grün“!
Nachdem ich die LR Fuel Xfer Pressure Sensoren eingebaut hatte, war die Xfer Leitung in der rechten Wing nicht mehr richtig fixiert. Der vorherige Sensor hatte eine andere Befestigung als der jetzige. Deshalb habe ich eine zusätzliche Adel Clamp eingearbeitet. Jetzt ist die Leitung wieder fest.
Neben der Datensammlung für die T/O Performance habe ich heute mit Langen Info noch den Transponder überprüft. Alle notwendigen Daten wurden positiv bestätigt. Das waren um 15:12 GMT im Detail:
Das Wetter war einladend. Ely und ich haben uns dazu entschieden die nächsten Daten für 650 kg zu erfliegen. Ich habe zuerst 20 Liter Sprit aus dem rechten Tank gesaugt und deponiert. Somit konnte ich das Gewicht von etwa 650 kg für die Tests erreichen. Als wir zur Startbahn rollten, wurde mir durch den Spruch des Flugleiters „20 kts aus Süden“ bewusst, dass das 20 Knoten Crosswind sind! Für den Start meinte ich, dass das nicht das Problem sein würde und bis zur Rückkehr der Wind wahrscheinlich etwas eingeschlafen sein wird. Der Abflug gestaltete sich aber überaus bockig. Nun gut! Jetzt sind wir in der Luft und fliegen unser Programm ab. Zuerst die Daten der Cruise-Performance zwischen 2500 und 9500 ft und anschließend noch zwei durchgehende Steigflüge von 2500“ bis 9500“. Einmal Richtung Norden und nach dem Descent nochmal das gleiche in opposite Direction. Jetzt ging es zurück zum Platz. Es war wegen des Saharastaubs sehr, sehr diesig. Der ganze Flug war sehr bockig unterhalb von 8000“. Ich habe mich für eine Flaps 20 Landung entschieden. Der Grund war die Information vom Flugleiter „Wind aus Süden mit 22 Knoten“. Sprit hatte ich ja noch genug in den Tanks um gegebenenfalls wo anders zu landen. Aber nicht, ohne es einmal versucht zu haben. Es war schon viel zu tun. Mit 60-70 kts statt üblicherweise mit 55 kts bin ich angeflogen und habe Power recht lange stehen lassen. Rechter Tank war ausgewählt, so konnte ich bei der Landung auf der 25 die linke Fläche hängen lassen und mit dem Seitenruder den Flieger mit der Runway allignen. Noch die eine und andere Böe und der Flieger setzte sich auf die Bahn. Allerdings erst etwa in der Mitte, was aber bei einer Bahnlänge von 900 Metern nicht besonders ins Gewicht fällt. Ich ließ den Flieger ausrollen und ging am Ende der Bahn von ihr herunter. Max demonstrated Crosswind ist also ab jetzt 20 kts, basierend auf 180/22 bei Landerichtung 25!
Vielleicht ist am Montag Regenwetter für all die Auswertungen. Morgen werden erst einmal Ostereier gesucht!
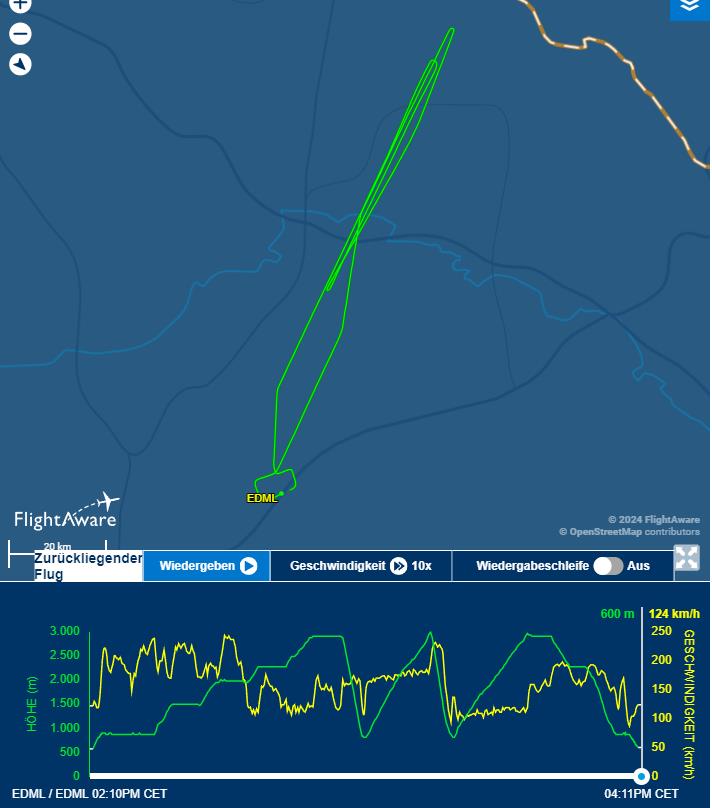
Heute habe ich zusammen mit Ely viele Daten gesammelt, um die Cruise Performance Tabellen erstellen zu können, die ins Flughandbuch müssen. Ebenso haben wir Daten gesammelt, um die Best Glide Speed errechnen zu können. Über 3 Stunden waren wir in der Luft dafür. Zur Auswertung sitze ich wieder mindestens die gleiche Zeit am PC
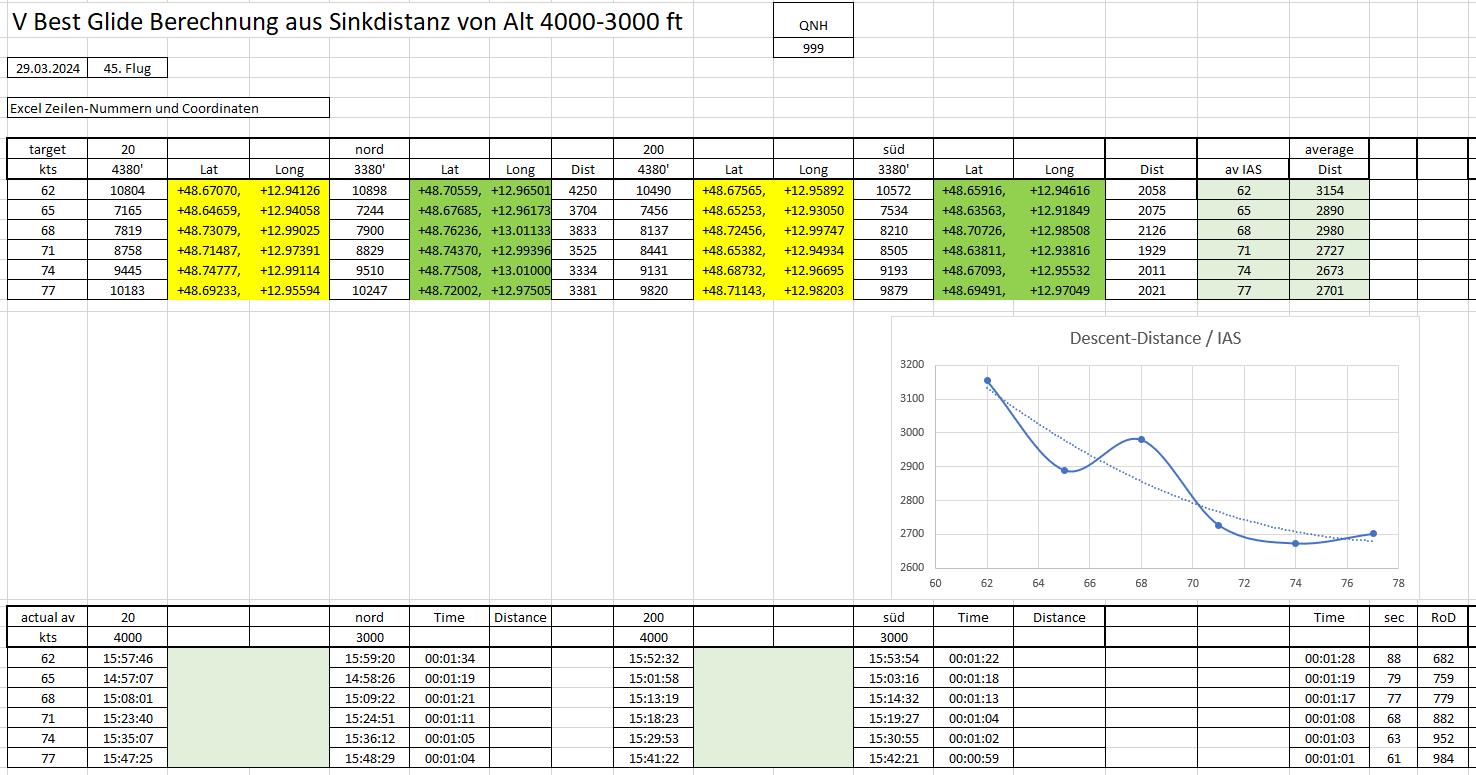
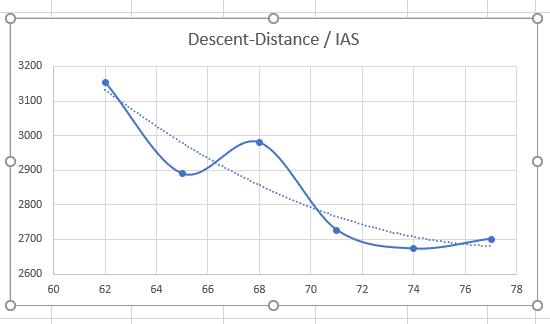
Best Glide Speed:
Aus den erhobenen Daten ergibt sich recht eindeutig eine Best Glide Speed von 62 kts, was auch der Vx entspricht. Hier die Tabellen und der Graph:
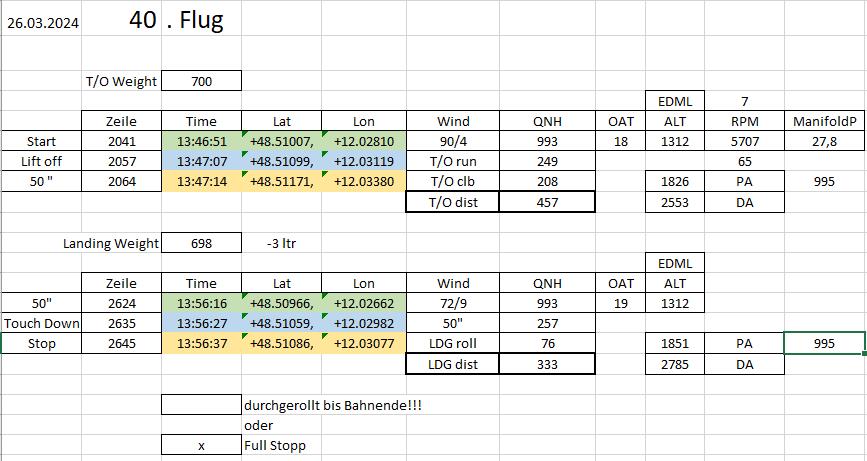
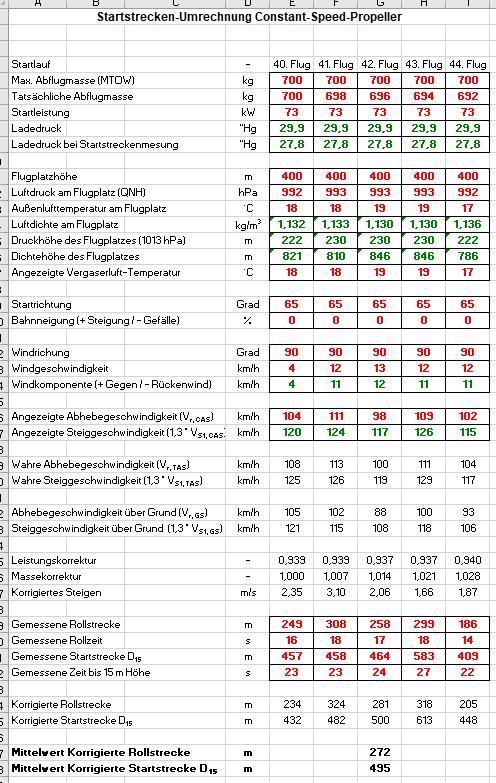
Einige Stunden habe ich mit dem Erstellen der Tabellen verbracht, um die korrigierte T/O Distance als Mittel der 5 Flüge errechnen zu können. Aber ein Resultat ist vorhanden. Als Repräsentant für die jeweiligen Flüge hier Flug 40:
Und hier die Durchschnittsberechnung für die Korrigierte Roll- und Start-Strecke:
Die Daten für eine valide T/O-Distance-Berechnung fehlen noch, ebenso für die LDG-Distance. Ich habe heute 5 Flüge durchgeführt, bei denen ich mir zwar Windstille gewünscht hätte, aber mit Windeinfluss zwischen 4 bis 15 Knoten in die Realität zurückversetzt wurde. Aber durch die Rechenmodelle, sollte dies alles kompensierbar sein.
Andreas Wansing hat heute am Sonntag Zeit gefunden, die Überprüfungen durchzuführen, um mir erneut eine Unbedenklichkeitsbescheinigung ausstellen zu können, damit ich unverzüglich die Verlängerung meiner VVZ beantragen kann, die am 04.03. ausgelaufen ist. Der Antrag ist mittlerweile beim LBA T4 gestellt.