Das Gewindeschneideisen ist nach langer Zeit endlich eingetroffen. Heute habe ich die Gewinde der Ventile beider Hauptradschläuche nachgeschnitten. Der Sensor passt jetzt perfekt, so wie es sein soll.
Auch habe ich die Auspuffblende entfernt. Beim Hinsehen direkt von vorn, kam ich zu der Ansicht, dass durch die Blende ein Gegendruck durch den Luftstrom erzeugt werden könnte. Nachdem Rotax enge Vorschriften zum Gegendruck aus der Auspuffanlage macht, wollte ich ein mögliches Risiko dadurch abwenden.
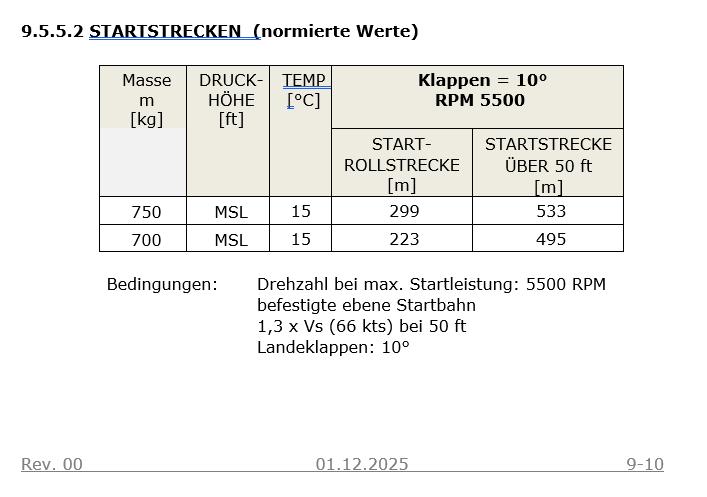
Bei der Erstellung des Flughandbuches ist mir aufgefallen, dass ich für die TO-Performance über 700 kg keine Werte für 700 kg bei RPM 5500 und Flaps 10 habe, um interpolieren zu können. Ich habe mich entschlossen 7 Starts zu fliegen.
Die letzten 3 Tage war ich mit der Aktualisierung meines Flughandbuches beschäftigt. Heute, so meine ich, sollte ich damit fertig geworden sein. Auch die Transition vom vorläufigen Flughandbuch Rev. 05 zum endgültigen Flughandbuch Rev. 00 habe ich fertiggestellt und an den Gutachter Schmieg gemailt, damit das 3. Gutachten geschrieben werden kann.
Heute war phantastisches Flugwetter. Somit habe ich die AOA Calibration gleich geflogen, genauso wie die Compass Calibration. Diesmal habe ich die Quality Werte von 109 erreicht. 10 Kreispaare bin ich geflogen.
Bei der Suche nach Stellen, die beim Motorträger ausgebessert werden müssen, ist mir eine Scheuerstelle der Ölleitung mit dem Engine Frame aufgefallen. Durch eine Verbindung der beiden Leitungen ist das Scheuern jetzt unterbunden.
Weiter ist mir aufgefallen, dass die Befestigung des Auspuffendrohrs mit Sicherungsdraht gebrochen war. Die jetzige Befestigung ist flexibel und deutlich stabiler.
Nachdem ich die Cowling wieder montiert hatte, wollte ich auch noch überprüfen, ob das Problem mit der Synthetic Vision jetzt mit der neuen OB-Datei von EasyVFR behoben ist. Es war zwar ein recht windiger Tag. Aber nachdem die Startbahn jetzt ganz akkurat am Display angezeigt wurde, hat mich das so begeistert, dass ich eine Platzrunde geflogen bin. Nach dem Abheben war ich mir gar nicht mehr so sicher, ob das eine gute Idee war. Denn es war extrem bockig. Entsprechend anspruchsvoll ist auch der Anflug geworden. Deshalb habe ich kein Foto vom Display in dieser Flugphase machen können. Mit der Landung war ich dann aber doch zufrieden, ohne durchstarten zu müssen. Somit ist das Avionic Problem endlich erledigt. Der Grund lag laut EasyVFR an den Höhendaten der Thresholds, die seit der Umstellung der Bahnen 07/25 auf 06/24 Anfang April das Problem verursachten. Mir ist vorher leider nicht aufgefallen, dass in Rotenburg die Bahn richtig dargestellt wurde und vermutete zuerst das Dynon Update, weil ich die Bahn von EDML letztmalig im März richtig dargestellt gesehen hatte. Zwischenzeitlich machte ich ja all die Updates. Erst der Zufall, weil ich die Videos der Schallpegelmessung nochmals angesehen hatte, hat die Erkenntnis gebracht, dass es nicht am Dynon Update gelegen haben kann, denn sonst wäre Rotenburg auch falsch bzw. gar nicht dargestellt gewesen. Aber, wie gesagt, jetzt ist wieder alles o.k. und ich kann bei EasyVFR bleiben.
Ich habe bis heute keine schlüssige Erklärung dafür, warum mir der Heading um 25° falsch angezeigt wurde. Die Compass-Flight-Calibration am 07.09.2025 hatte dies wieder in Ordnung gebracht. Mir ist jetzt aber noch eine Änderung eingefallen, die diese Erscheinung verursacht haben könnte. Ich habe die Original-Gurte von TAF mit Gadringer Gurten getauscht. Die Gadringer Gurte haben Beschläge aus Eisen, die jetzt in der Nähe der Magnetometer (ADAHRSe) an der Gepäckrückwand montiert sind. Diese habe ich heute mit den Beschlägen von TAF aus Aluminium getauscht. Eine erneute Compass-Flight-Calibration könnte jetzt die Anzeige weiter verbessern.
Im Baumarkt habe ich keine RAL 7031 gefunden. Ein ganzes Kilo wollte ich mir bei MIPA nicht anmischen lassen. Ich bin jetzt auf Taubenblau RAL 5014 ausgewichen. Die Cowling und das Bugfahrwerk sowie Teile des Motorträgers habe ich mit Akzo Nobel 2k Primer geprimed und innerhalb 45 Minuten lackiert. Die Cowling mit Verkehrsweiß RAL 9016 gespritzt, Motorträger und Fahrwerk mit dem Pinsel mit normaler Kunstharzfarbe. Letztere kann also bei Bedarf auch wieder abgewaschen werden.
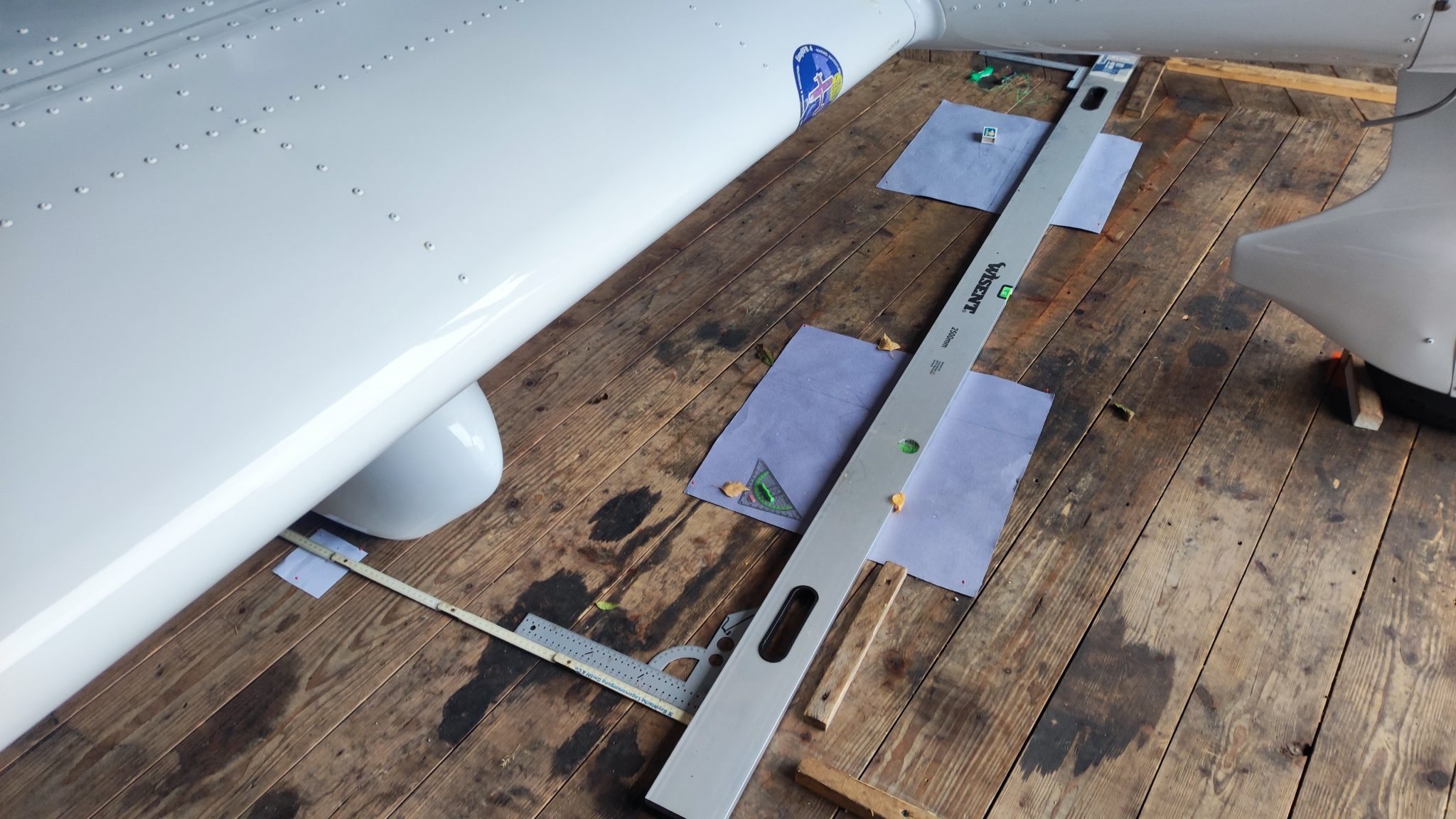
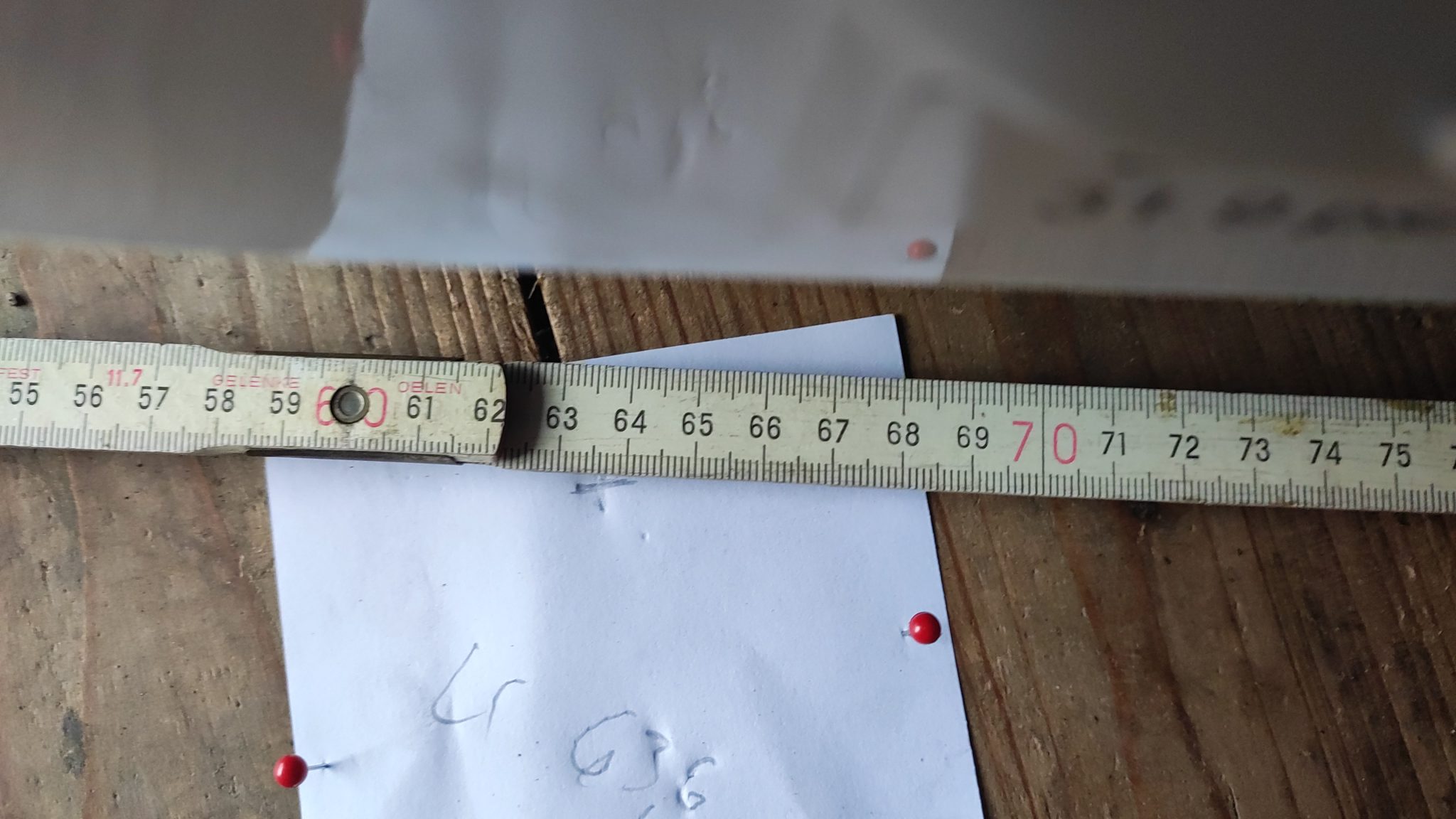
Ich dachte mir, es wäre sinnvoll, wenn ich das Fahrwerk neu vermesse in Bezug auf die Datum Line. Zuerst habe ich den Flieger horizontal ausgerichtet. Eine kleine Unterstützung am hinteren Leitwerk hat das erledigt. Ich konnte danach die gleichen Werte feststellen, wie sie bereits im Flughandbuch enthalten sind. Bugrad -861 mm, linkes und rechtes Hauptrad 636 mm zur Bezugsebene bzw. Datum Line. Somit brauche ich das Handbuch wegen des Fahrwerkswechsels auf TSi in diesem Punkt nicht ändern.
Ich musste mir auch überlegen, Wie ich die Lackschäden an der unteren Cowling bei den Öl- und Wasser-Radiatoren ausbessern kann. Ich überlegte, diese Bereiche eventuell Schwarz Matt zu lackieren. Die Vergleichsfotos die ich mit einer eingesteckten fast schwarzen Folie gemacht habe, führten dazu, dass ich mich wieder für Weiß entschieden habe. In Schwarz erscheint mir der Flieger zu „grimmig“.
Der Grund für das Abplatzen der Farbe im Flug durch starken Regen liegt wohl darin, dass TAF seinerzeit die Cowling nur außen grundiert hatte. Im Bereich der Schächte, wo jetzt die Lackschäden sind, war der Kunststoff unbearbeitet. Ich habe nur nur notdürftig die Oberfläche angeraut und ohne Primer direkt lackiert. Das war offensichtlich zu schlampig von mir gemacht. Jetzt ist dieser Bereich richtig präpariert.
Das Bugfahrwerk hat mittlerweile auch schon Rostschäden, die ich beheben will. Ich habe mir eine Farbkarte von MIPA besorgt und meine, das Blaugrau RAL 7031 kommt der Originalfarbe recht nahe. Die will ich mir noch besorgen.
Das Flughandbuch wollte auch auf den neuesten Stand gebracht werden. Ich habe die Drehzahl-Limitierung auf RPM 5500 eingearbeitet. Die Startstrecken-Tabellen für RPM 5800 sind damit hinfällig. Das muss ich später noch erledigen.
Don Jones hat mir zum Test Aviation und Obstacle Database Files von Airmate gemailed. Nachdem ich herausgefunden habe, dass im März das letzte Mal eine korrekte Anzeige der Synthetic Vision (Terrain) stattgefunden hat, habe ich zuerst die März Dateien von EasyVFR nochmals geladen. Leider konnte ich die Runway nicht dadurch zur Darstellung an der richtigen Position bringen. Daraufhin habe ich die Airmate Dateien geladen. Und, hurra, die Bahn ist da! Zuerst nur quer vor mir, weil ich am Holdingpoint 06 geparkt hatte. Jetzt dachte ich, es könnte dadurch eine Art Reset stattgefunden haben und lud der Reihe nach von Januar bis Oktober alle EasyVFR Datafiles. Kein einziger hat die Runway dargestellt. Auch nicht der Satz vom März. Daraufhin habe ich wieder die Airmate Dateien geladen und die Runway war wieder da. Danach bin ich auf die Bahn 24 gerollt und hatte ein perfektes Bild. Das ist doch ein Erfolg. Ich habe eine Platzruunde gedreht. Von der Position kurz vor dem Aufsetzen bei der Landung habe ich leider kein Bild mehr gemacht. Was jetzt EasyVFR zu dieser Situation sagen wird, ist unklar. Ich bin neugierig.