Ely war heute auch wieder mit von der Partie. Auf der Fahrt zum Flugplatz habe ich noch 20 ltr Sprit bei der Tanke gezapft. Mit diesen zusätzlichen Sprit kann ich also beide Main Tanks komplett gleichmäßig füllen, womit die Kalibrierung beider Sticks jetzt auch sicher durchgeführt werden konnte. Ich habe allerdings erst einmal den Flieger wieder enttankt und mit der Kalibrierung des linken Main-Tank Sensors begonnen. Diesmal konnte ich, nachdem die Kalibrierung des Sensors abgeschlossen war, weil er seinen Maximalwert erreichte, die Sticks beider Tanks weiter markieren, bis beide Tanks voll waren. Somit sind die Main Tank Sensoren und Sticks zuverlässig kalibriert. Jetzt haben wir sukzessive jeweils 5 Liter aus den Main Tanks herausgepumpt und in die LR-Tanks gefüllt, um zuerst den linken LR Tank zu kalibrieren. Leider ist uns dann für den rechten die Zeit davongelaufen.
Zuerst habe ich weitere Benzinkanister gekauft. 2×5 ltr und 1×10 ltr. Somit konnte ich den Flieger wieder komplett enttanken. Ich habe alle bisherigen Kalibrierungsdaten verworfen und mich dazu entschlossen, immer beide Tanks gleichmäßig zu befüllen, damit keine hängende Wing zustande kommen kann und somit die Kalibrierung genauer durchgeführt werden kann. Der Sprit hat gereicht um bis zur oberen Grenze des Sensors des linken Main Tank Sensors die Daten zu sammeln. In den Main Tanks waren jetzt jeweils 65 Liter Sprit. Ich brauche also nochmals 20 Liter, um auch die Sticks bis zur Vollanzeige markieren zu können. Ely war wieder dabei um die „Buchführung“ zu machen und mir auf die Finger zu schauen, dass ich auch nichts vergesse. Beispielsweise ist es wichtig, vor jeder Messung an die Tankböden zu klopfen, damit sich der Sensor, der auch einmal hängen bleiben kann, sich einregeln kann. Man hat auch sonst schnell mal vergessen, ob man jetzt links oder rechts das letzte Mal den Sprit eingefüllt hat. Zu zweit und verbunden mit akribischer Buchführung hat das aber gut geklappt. Bei der Rückfahrt habe ich nochmals 4×10 ltr Kanister gekauft.
Ich habe mir aus der Apotheke Spritzen mit etwas mehr als 20 mm Außendurchmesser gekauft und einen PVC Schlauch mit 20 mm Innendurchmesser. Das Pitot hat einen Außendurchmesser von 20 mm. So dachte ich, ein hermetisch dichtes System herstellen zu können, um die Dichtigkeit überprüfen zu können. Das hat aber gar nicht funktioniert. Hierfür braucht es spezielle Prüfhardware sagte mir ein Prüfer vom Flugplatz. Damit habe ich diese Aktion abgebrochen. Beim Test der Dichtigkeit des Static Systems hatte ich zwar eine Anzeige, ob dieser aber in den Limits blieb, ist eher fraglich. Ich hatte nach dem Herausziehen des Spritzenkolbens eine stabile Sinkrate von 350 ft/min angezeigt bekommen. Von Dichtigkeit kann also keine Rede sein. Auch hier habe ich die eigentliche Prüfung auf später verschoben, zusammen mit meinem Bauprüfer Andy. Ein weiterer Punkt ist noch die Compass Kalibrierung. Diese Warnung wollte ich baldmöglichst los werden. Um mich primär auf die Flugzeugführung konzentrieren zu können, habe ich Ely heute mit zum Flugplatz genommen, die mich bei den Schreibarbeiten unterstützen sollte. Ich habe mit der Flugleitung vereinbart, bis zur Tankstelle rollen zu können, um von der bekannten Taxiway Richtung aus meinen Compass zu kalibrieren. Als ich aber versuchte, den Magnetic Course des Taxiways einzugeben, musste ich feststellen, dass ich nur north, east, south und west selektieren kann. Daraufhin bin ich wieder zurück zum Hangar gerollt. Etwas deprimiert darüber, dass heute gar nix funktioniert hat, konnte ich mich aber wieder daran erfreuen, dass der Flieger heute das 1. Mal aus eigener Kraft bewegt wurde. Das vom Gefühl her etwa so wie damals, als der Rumpf das 1. Mal auf seinen eigenen Rädern stand. Auch hat der Rotax heute das 1. Mal seinen Lebenssaft aus den Flugzeugtanks bezogen. Beim Erststart waren die Wings ja gar nicht montiert und ein Behelfstank hatte den Sprit geliefert. Das Rollen war für mich etwas ungewohnt, weil ich bisher in allen Flugzeugen mit den Füßen gebremst habe. Ich kann mit den Füßen aber nur das Nose Wheel lenken und das damit verbundene Seitenruder betätigen. Bremsen muss ich mit dem Handhebel, rechts neben dem Throttle Lever. Aber es hat gut funktioniert. Ein Grund zum Feiern war das erste Rollen allemal. Somit haben wir für heute Schluss gemacht.
der rechte Static Port ist mit Thesa zugeklebtder vorbereitete Spritzenkörperder so erstellt Unterdruck war nicht stabilauch die Idee, einen kleinen Überdruck stabil herstellen zu können, schlug fehl
Weil ich mir nicht sicher war, ob die Werte der Kalibrierung der letzten Aktionen wirklich zutreffend waren, habe ich das ganze noch einmal von vorne gestartet. Aber auch diesmal mit „hängender Wing“.
die Pressure Indication ist wieder weg, alle 4 Tanks vorhanden
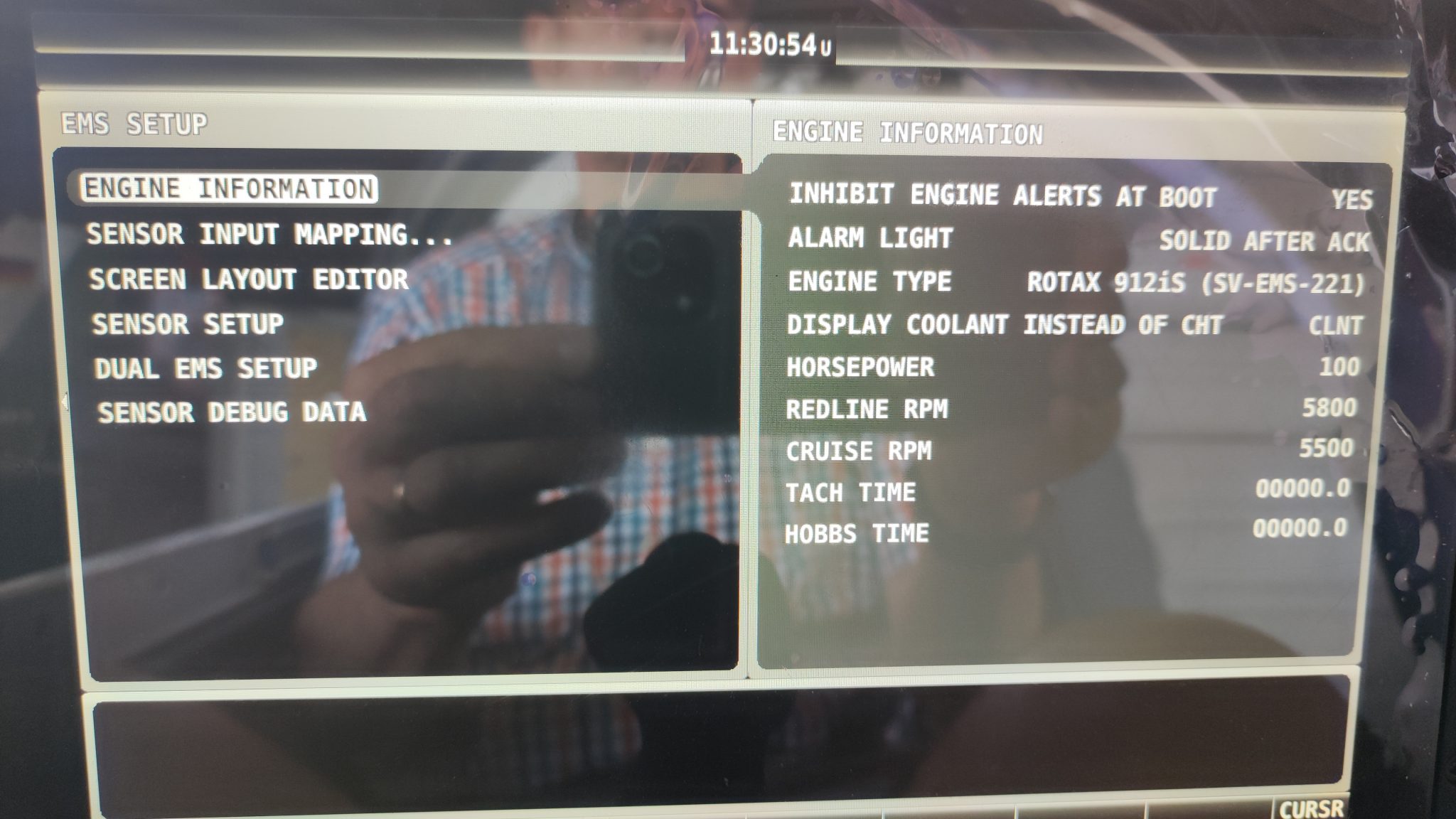
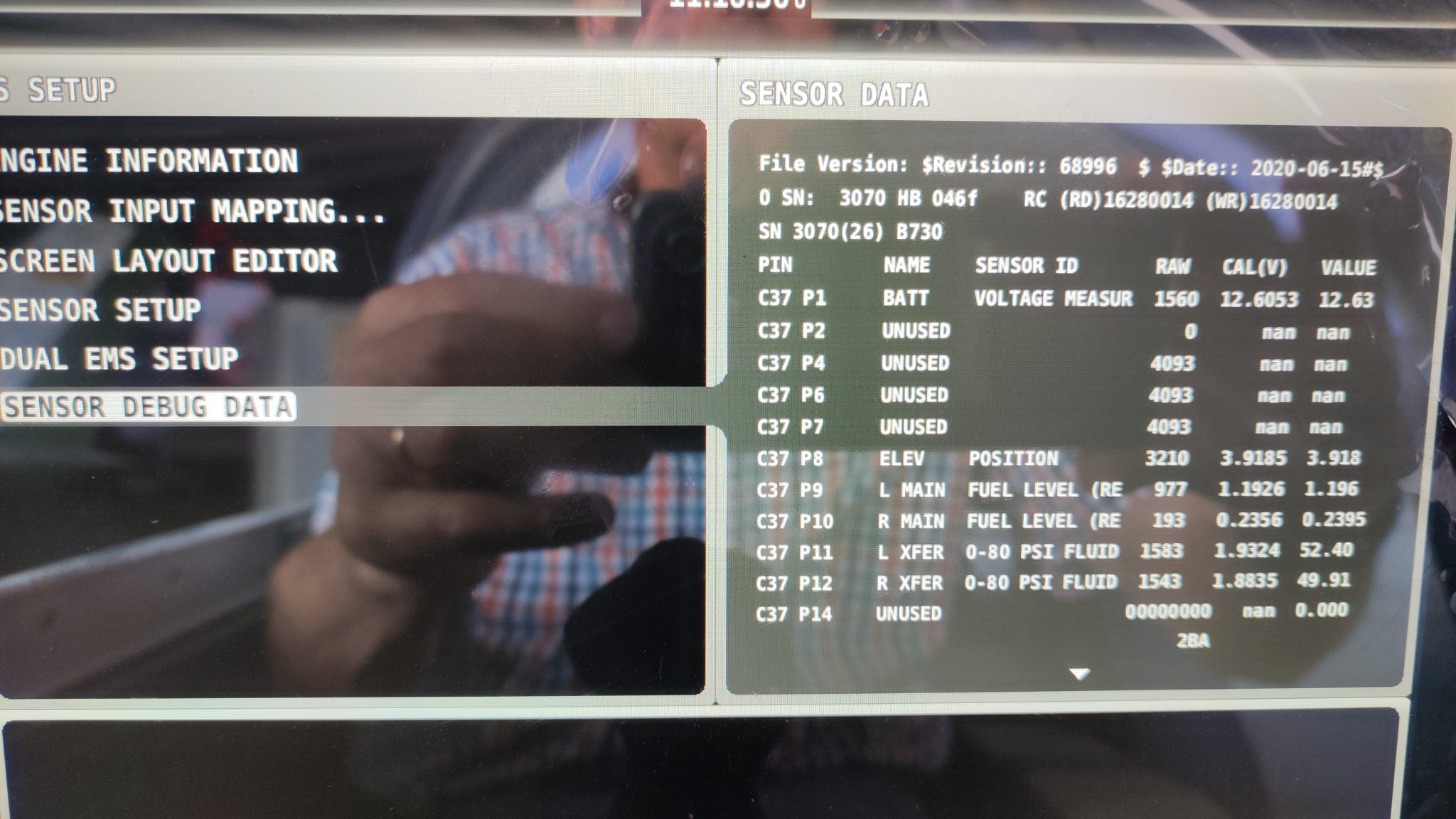
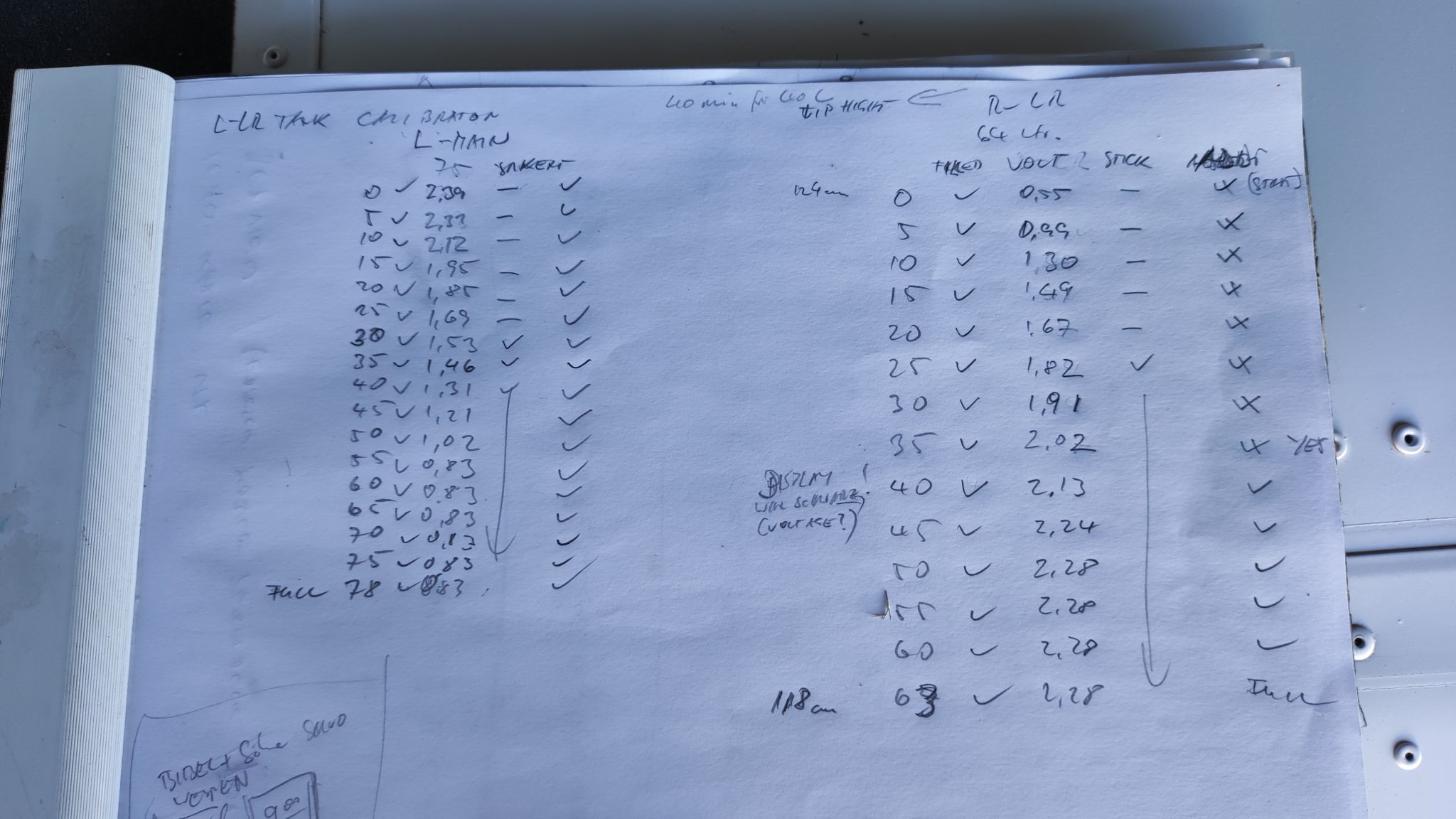
Zuerst wollte ich den L Main Tank Sensor kalibrieren. Das hat zügig bis 45 Liter funktioniert. Plötzlich war das HDX schwarz. Ein Blick auf die Voltanzeige des Ladegeräts zeigte unter 11 V an. Das bedeutete, ich muss wieder von vorne beginnen. Damit dies aber nicht nochmal passiert, habe ich mir folgendes überlegt. Zum einen habe ich nur noch HDX 1 eingeschaltet. Zum anderen habe ich die Rücklaufleitung wieder an den Rotax angeschlossen und die Zulaufleitung getrennt. Somit brauchen die Pumpen nicht über die 3 bar des Druckreglers pumpen. Das resultierte darin, dass erstens keine Blasen mehr im Schlauch erkennbar waren, was jetzt eindeutig den Motor selbst als Ursache für die Blasen beweist, und dass nur eine einzige Pumpe, die AUX Pump, reicht um die gleiche Menge Sprit in der halben Zeit zu fördern. Somit braucht nur die EMU eingeschaltet sein aber keine Lane dazugeschaltet werden. Jetzt viel die Spannung nicht mehr unter 13,1 V und ich konnte meine Kalibrierung sicher durchführen. Weil aber jetzt in beiden Main Tanks etwa 40 ltr Sprit waren, und der R LR Tank leer war, habe ich diesen als nächste kalibriert. Das verlief ohne seltsamen Geschehnissen. Ich konnte maximal 63 ltr Einfüllen. Es handelt sich also bei beiden LR Tanks um 60 Liter Tanks und nur die Main Tanks haben ein Fassungsvermögen von 75 Litern. Mittlerweile war der L Main Tank leer und ich konnte mit der Kalibrierung beginnen. Ich musste nur den Sprit des R LR Tanks in den R Main Tank transferieren. Das dauert aber eine Weile. Ich brauche etwa 1 Minute pro Liter. Während des Umpumpvorgangs habe ich mich nochmals mit dem Setup Menu beschäftigt und den richtigen Motor ausgewählt, den Rotax 912iS. Danach habe ich alle auswählbaren Drucksensoren ausprobiert, um zu sehen, ob vielleicht bei einem Sensor eine Anzeigenveränderung stattfindet, wenn die XFER Pump ein bzw. ausgeschaltet ist. Bei keinem einzigen war aber eine Reaktion in der Anzeige erkennbar. Das bedeutet, dass ich diese beiden Sensoren, die ich eingebaut habe, für diesen Zweck nicht verwenden kann, weil sie für höhere Drücke ausgelegt sind. Ob ich mir andere Sensoren besorge oder ganz darauf verzichte, werde ich später entscheiden. Mittlerweile war genügend Sprit umgepumpt und ich konnte mit der Kalibrierung des L Main Tanks starten. Diesmal verlief auch hier alles nach Plan. Ich konnte 78 Liter einfüllen, womit sich die Nominal-Tankmenge von 75 Litern bestätigen ließ. Morgen ist der letzte Tank an der Reihe.
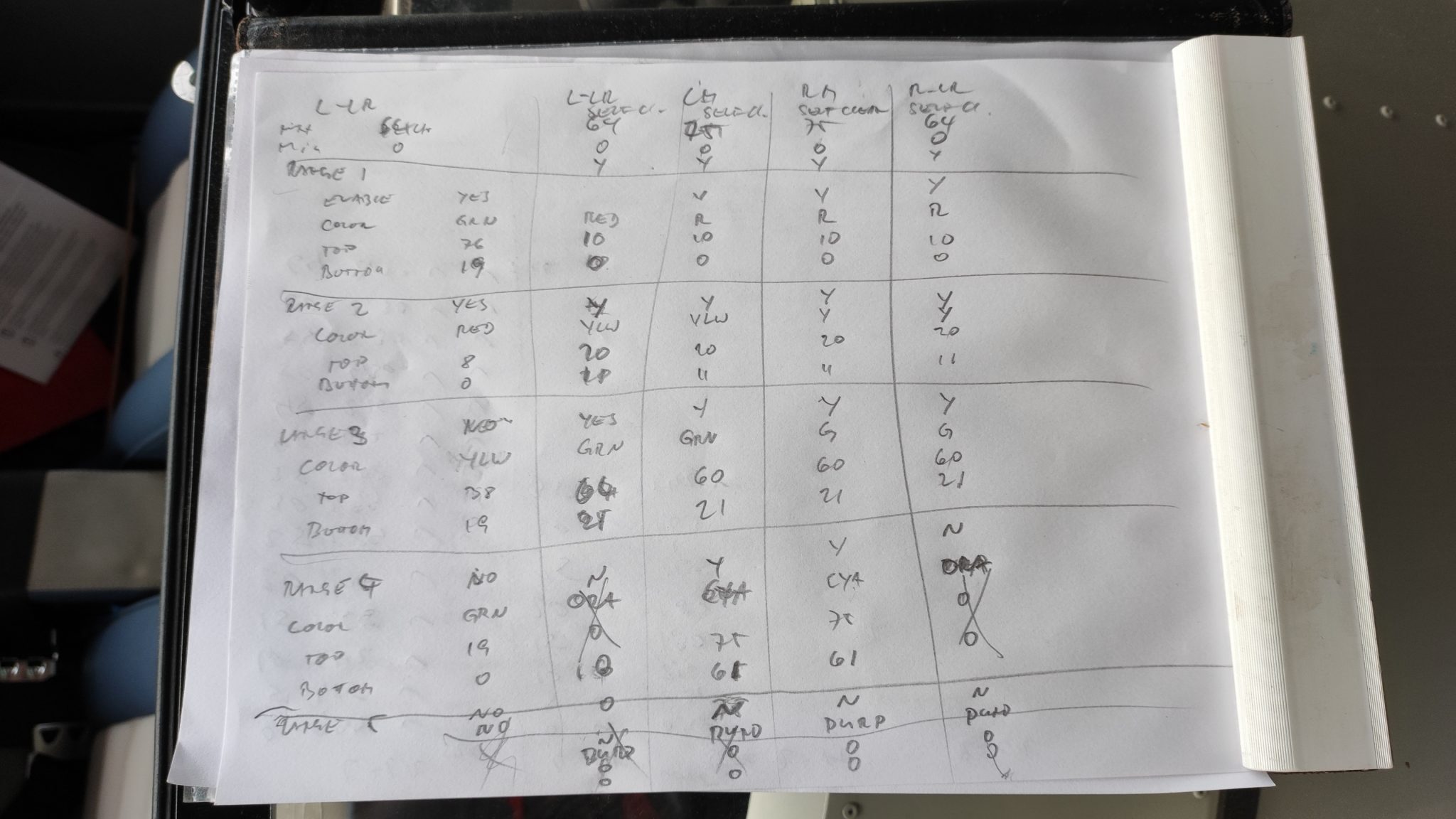
jetzt ist der richtige Engine Type eingestelltkein einziger der auswählbaren Sensoren an P12 hatte Erfolgdas neue Setup auf der Zulaufleitung, jetzt ohne Blasenmein Kalibrier Protokoll
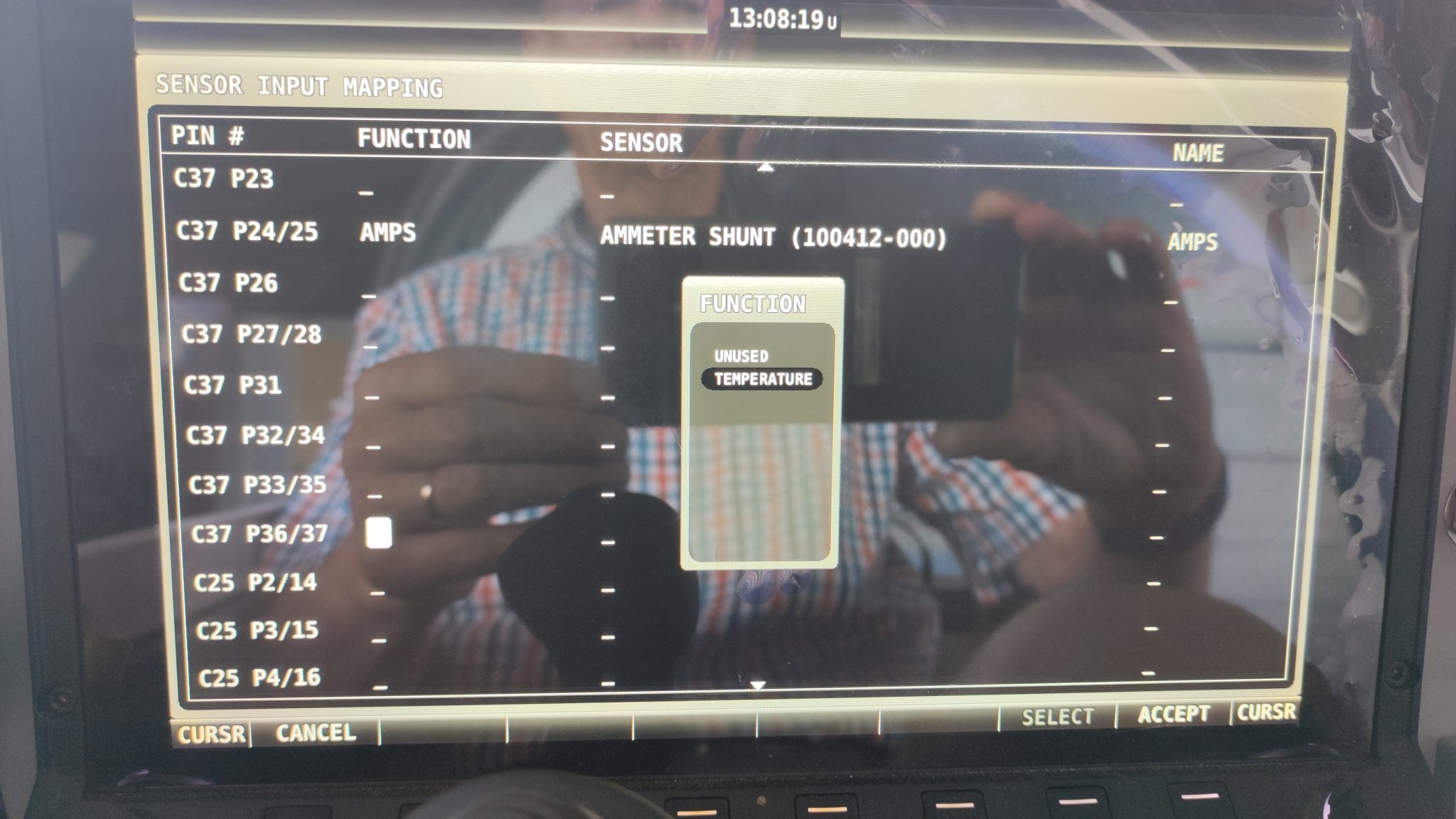
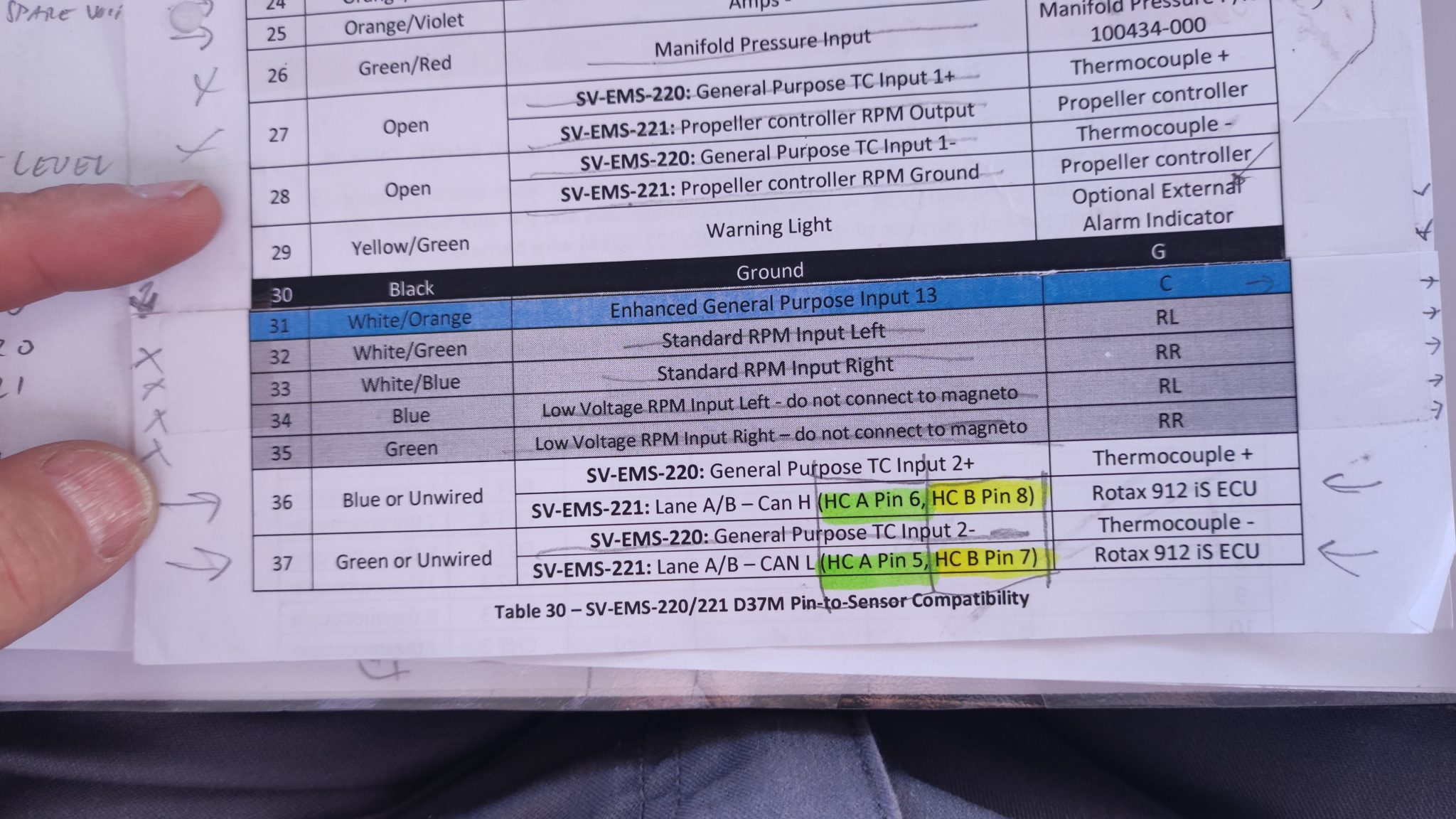
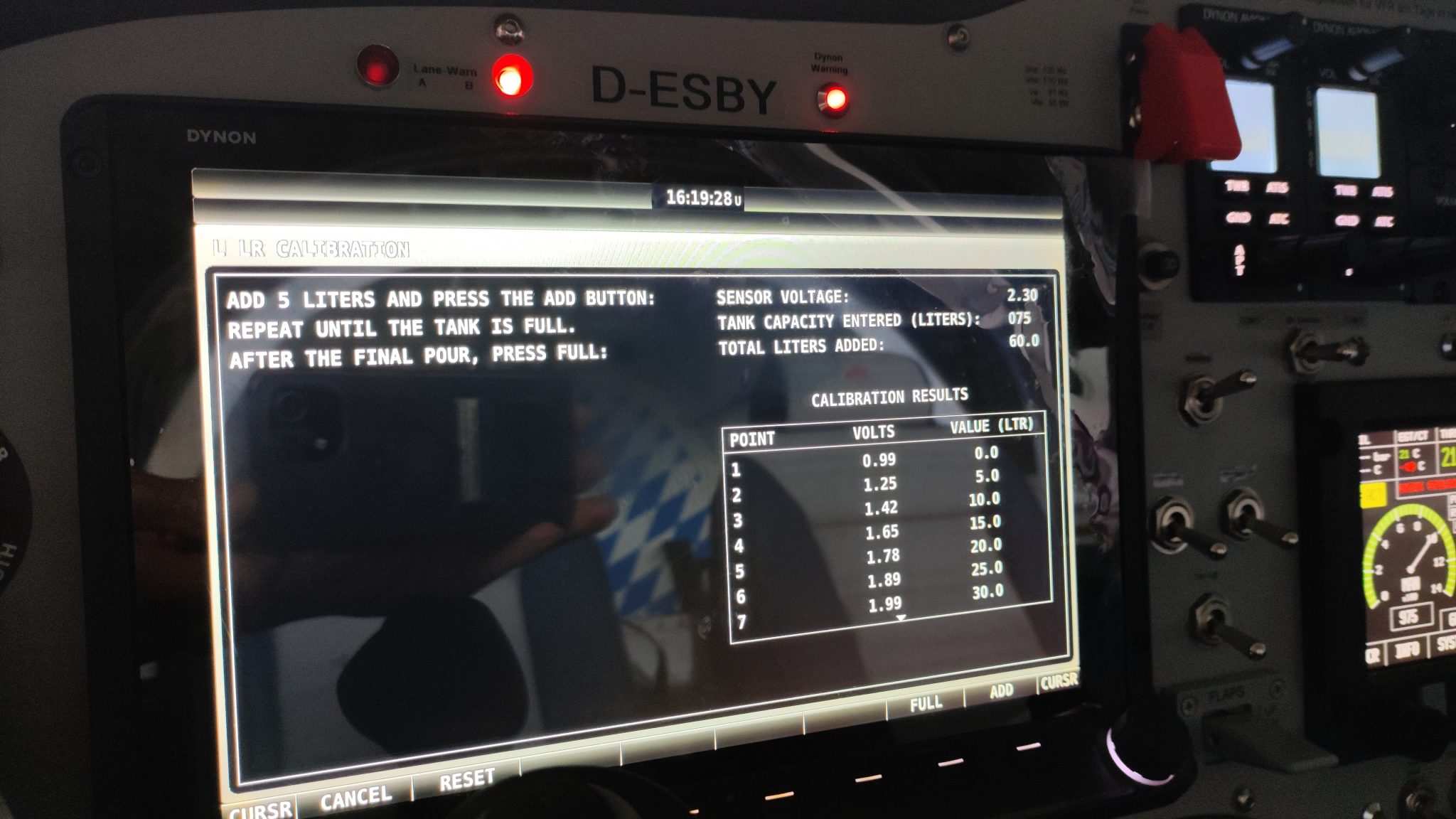
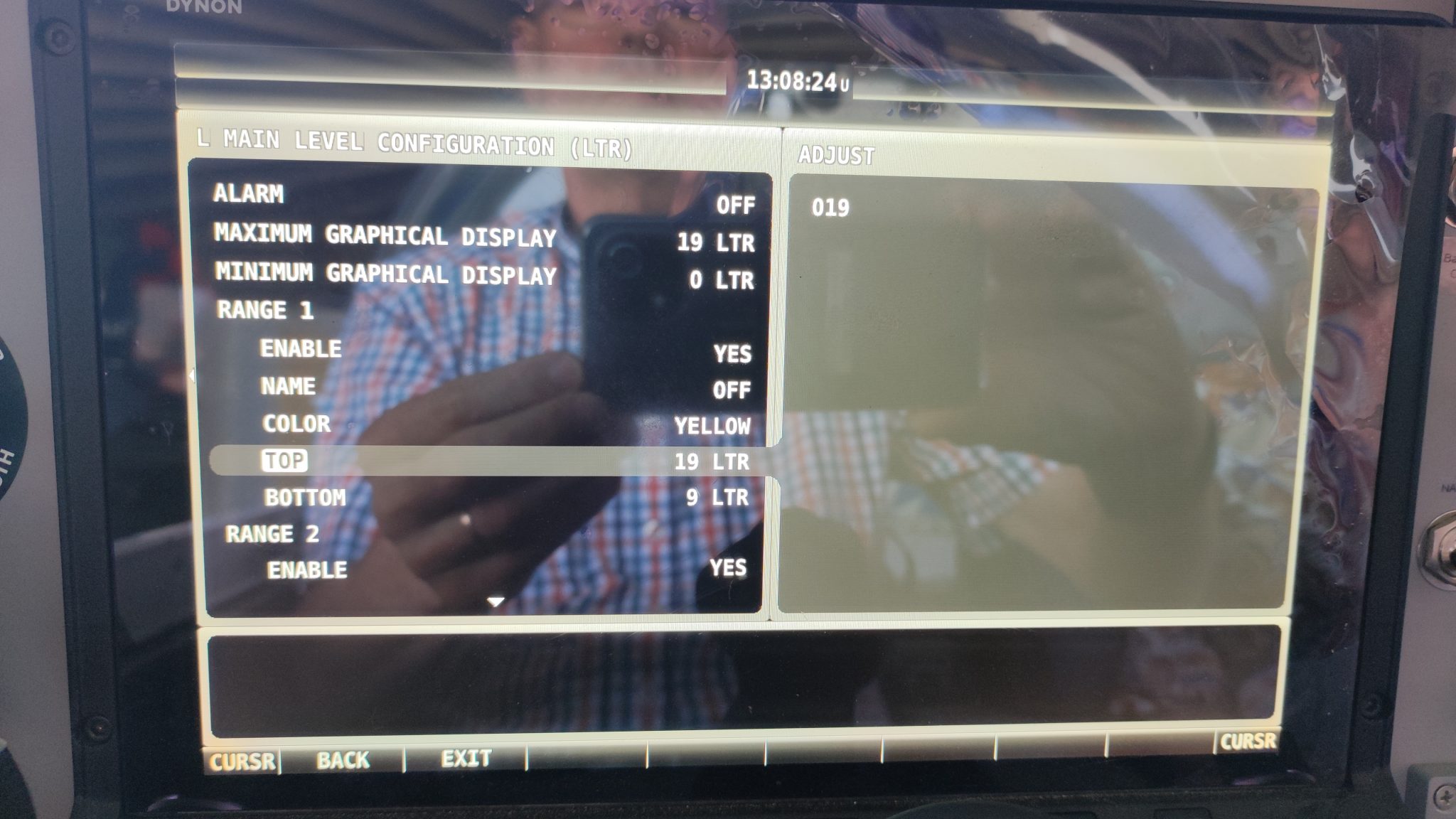
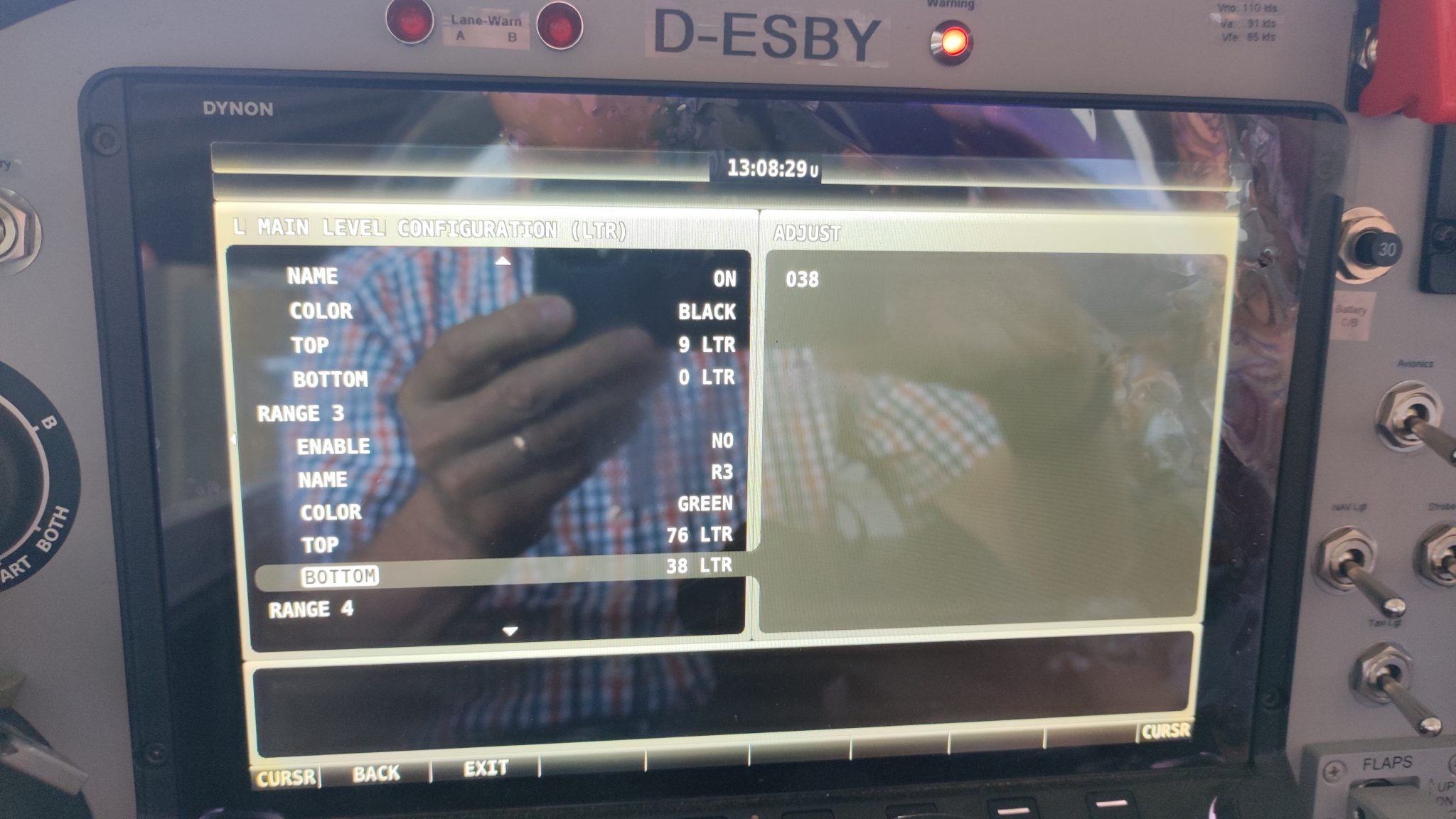
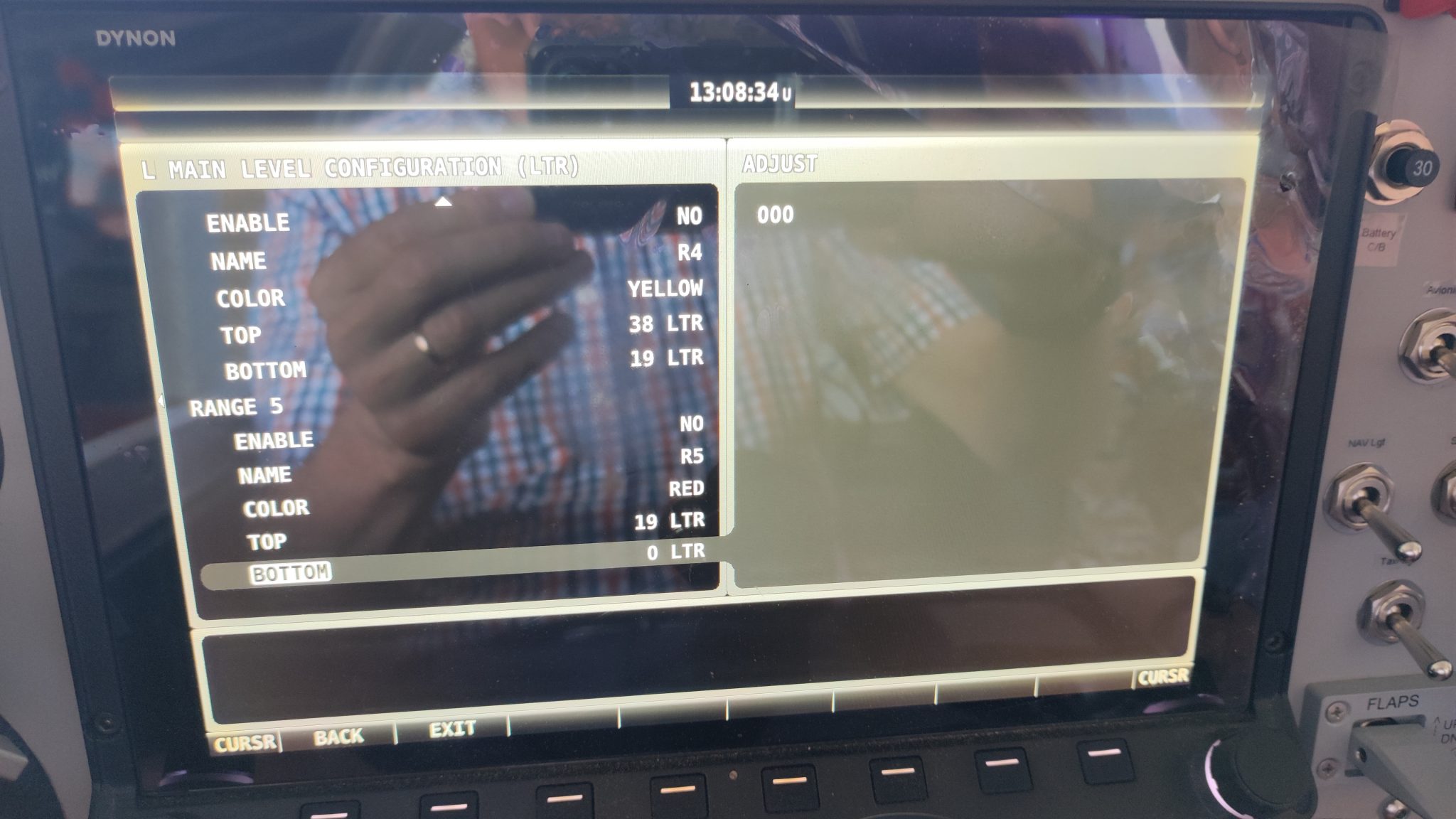
Das Lesen des Dynon Installation Manuals hat sich gelohnt. Die Kalibrierung der Fuel Level Sensoren sind nicht in einem EMS-Untermenu, sondern im Sensor-Calibration Menu. Jetzt habe ich auch das Menu von gestern verstanden, in welchem die Art der Anzeige der Fuel Level konfiguriert werden kann. Ich konnte hier die verschiedenen Ranges bestimmen, wie beim Auto Reserve in rot und Normalbereich in grün. Jetzt habe ich auch die Konfigurationsseite gefunden, um die nicht benutzten, vorkonfigurierten Eingänge und deren Anzeigen zu löschen. Ich habe allerdings jetzt ein Problem, weil ich nicht weiß, wie ich die Eingänge an Pin 36/37 zu konfigurieren soll. Hier ist der CAN Bus von Rotax angeschlossen. Die Auswahl bietet aber nur „unused“ oder „Temperature“ an. Aber das werde ich auch noch herausbekommen. Nachdem jetzt die Anzeigen vorbereitet waren, habe ich versucht die Kalibrierung des Level Sensors vom L Main Tank durchzuführen. Das hat aber nicht aufs erste Mal funktioniert. Nach dem „Start“ habe ich die ersten 5 Ltr eingefüllt und wollte mit der Kalibrierung fortfahren. Da sagt mir Dynon, dass sich der Voltage Wert nicht geändert hätte und ob ich ihn trotzdem verwenden möchte. Ich dachte, das wäre normal, weil vielleicht der Sensor erst über 5 Ltr ansprechen würde und tippte auf „yes“. Im weiteren Verlauf, nachdem die Range der Darstellung, ab Point 8 nicht mehr sichtbar war, vielleicht war ich auch nur zu doof dazu, die Tabelle zu scrollen, habe ich mich einmal vertippt und den Kalibrierungsvorgang unbeabsichtigt abgebrochen. Ich habe es dann mit dem L-LR Tank versucht. Ich habe wieder 75 Ltr als Tank Kapazität eingetragen und den Kalibriervorgang gestartet. Ich habe jetzt gesehen, dass nach etwa 5 Sekunden der Point 1 mit einem Volts-Wert von 0,99 und dem Value 0,0 in die Tabelle eingetragen wurde. Erst jetzt habe ich dann die ersten 5 Ltr eingefüllt, im Bereich des Sensors von unten an den Tank geklopft und gewartet, bis sich die Sensor Voltage Anzeige geändert hat. Jetzt habe ich den ADD Button gedrückt und gewartet, bis Point 2 in der Tabelle erschien. So habe ich den linken Long Range Tank sukzessive aufgefüllt. Nachdem ich insgesamt nur 80 Liter Sprit zur Verfügung habe, schon etwa 30 Liter im Main Tank waren, habe ich Sprit wieder aus dem Main Tank herausgepumpt um ihn für die LR Tank Kalibrierung nutzen zu können. Als ich aber auf 65 Liter auffüllen wollte, lief der Tank bei etwa 64 Litern über. Das hat mich sehr überrascht. Ich ging bisher davon aus, dass sowohl die Main Tanks, als auch die Long Range Tanks, ein Fassungsvermögen von 75 Litern hätten. Diese Ansicht muss ich wohl revidieren. Der L-LR Tank Sensor ist jetzt erst einmal kalibriert. Mit meinen heute gemachten Erfahrungen, werde ich morgen die 3 anderen Tanks kalibrieren können.
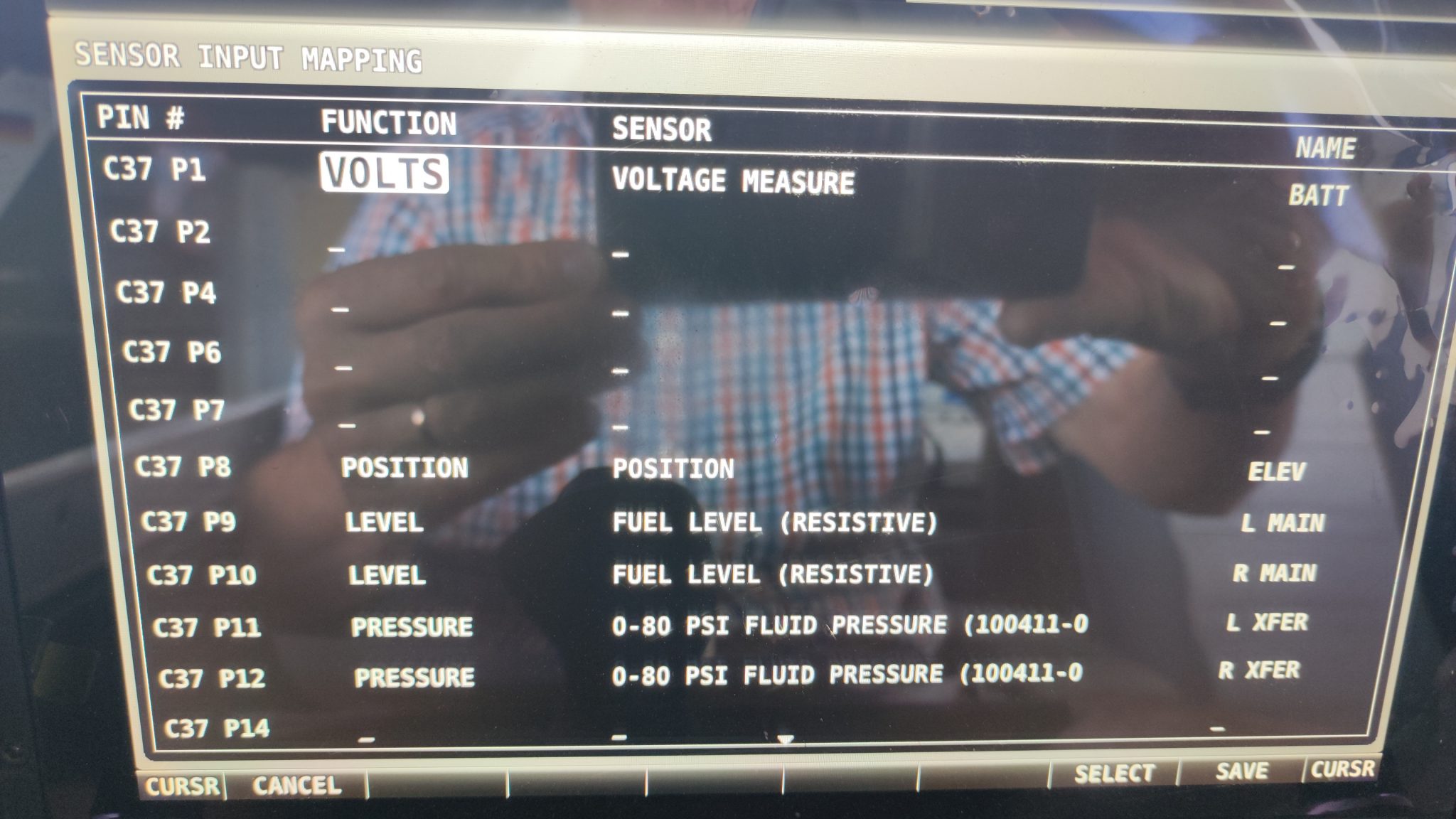
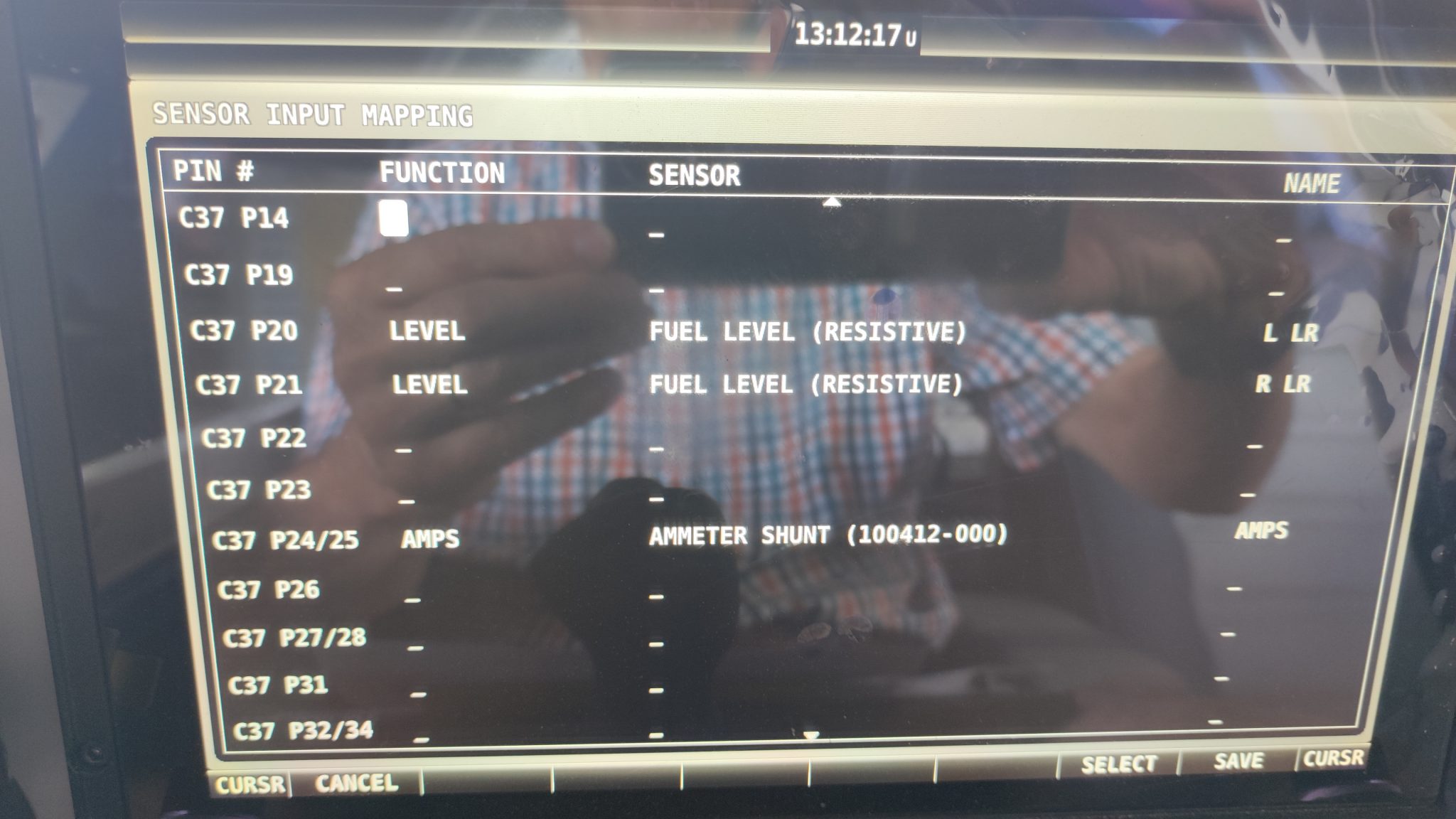
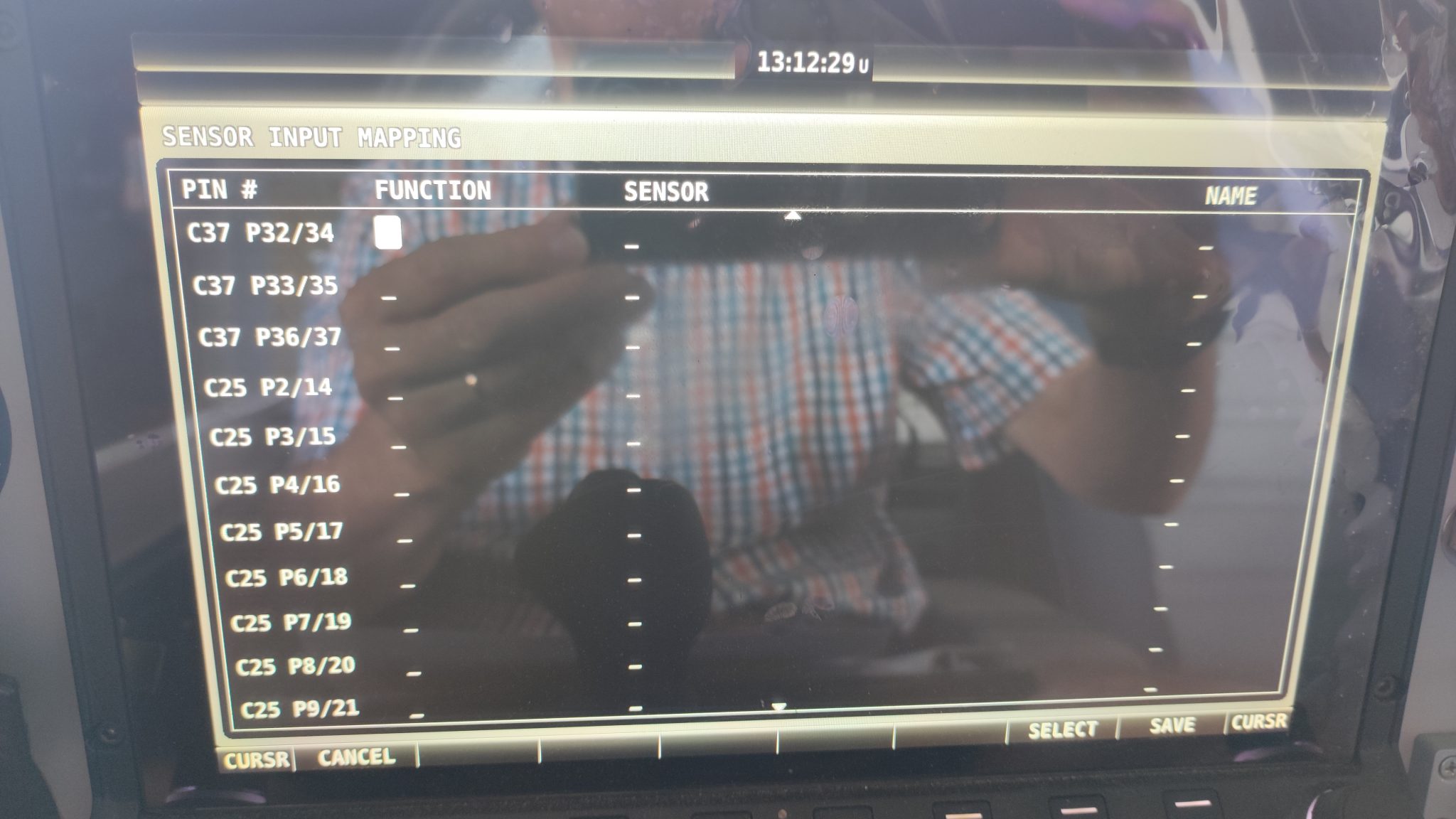
bei P36/37 steht nur UNUSED oder TEMPERATURE zur AuswahlHier habe ich aber CAN H und L angeschlossen (bisher nur Lane A)Jetzt ist die Pin-Liste aufgeräumt Pins 1 bis 14Pins 15 bis 32/34Pins 33/35 bis 36/37 das Drumherumdie Tabelle (sichtbarer Teil 1 bis 7) des L-LR Tank SensorsDie Tabelle des Anzeigen-Editors für die Sensoren
Ich wollte heute eigentlich die Tankuhren konfigurieren. Also die jeweils eingefüllten Liter Fuel in anzeigbare Werte wandeln. Ich konnte aber das hierfür notwendige Menu im Dynon Setup nicht finden. Stattdessen bin ich beim Konfigurator für die Eingangs-Pins des EMS hängen geblieben. Hier konnte ich jetzt alle Pins, die nicht angeschlossen sind, auf unused schalten und die verwendeten den angeschlossenen Sensoren zuordnen. Die Konfiguration der Fuel Level Sensoren ist mir aber noch nicht gelungen. Stattdessen bin ich in einem Editor der EMS-Page gelandet. Hier hätte ich gewisse Ranges bei den Sensoren definieren können, aber keine Liter. Ich habe die weitere Konfiguration erst einmal verschoben, weil ich heute Besuch von Wolfgang mit seiner RV-12 bekam. Das war dann erst einmal wichtiger und hat auch sicherlich mehr Spaß gemacht als im Nirvana der Konfigurationsseiten herumzustochern, ohne genau zu wissen, was man tut. Ich werde versuchen aus den Manuals mehr heraus zu bekommen.
Die Konfigurationsseite, bei der ich die Liter Kalibrieren wollte war falschhier kann man die Ranges 1 bis 5 konfigurierendamit habe ich heute erst einmal aufgehört
Das Alert Service Bulletin von Rotax bezüglich der Auswechselung der Fuel Pumps musste in Angriff genommen werden. Meine Pumpen Seriennummern sind leider betroffen. Ich habe heute das Assy ausgebaut. Ob ich die Pumpen selber wechsle oder das Assy zu Rotax schicke oder bringe, werde ich morgen entscheiden.
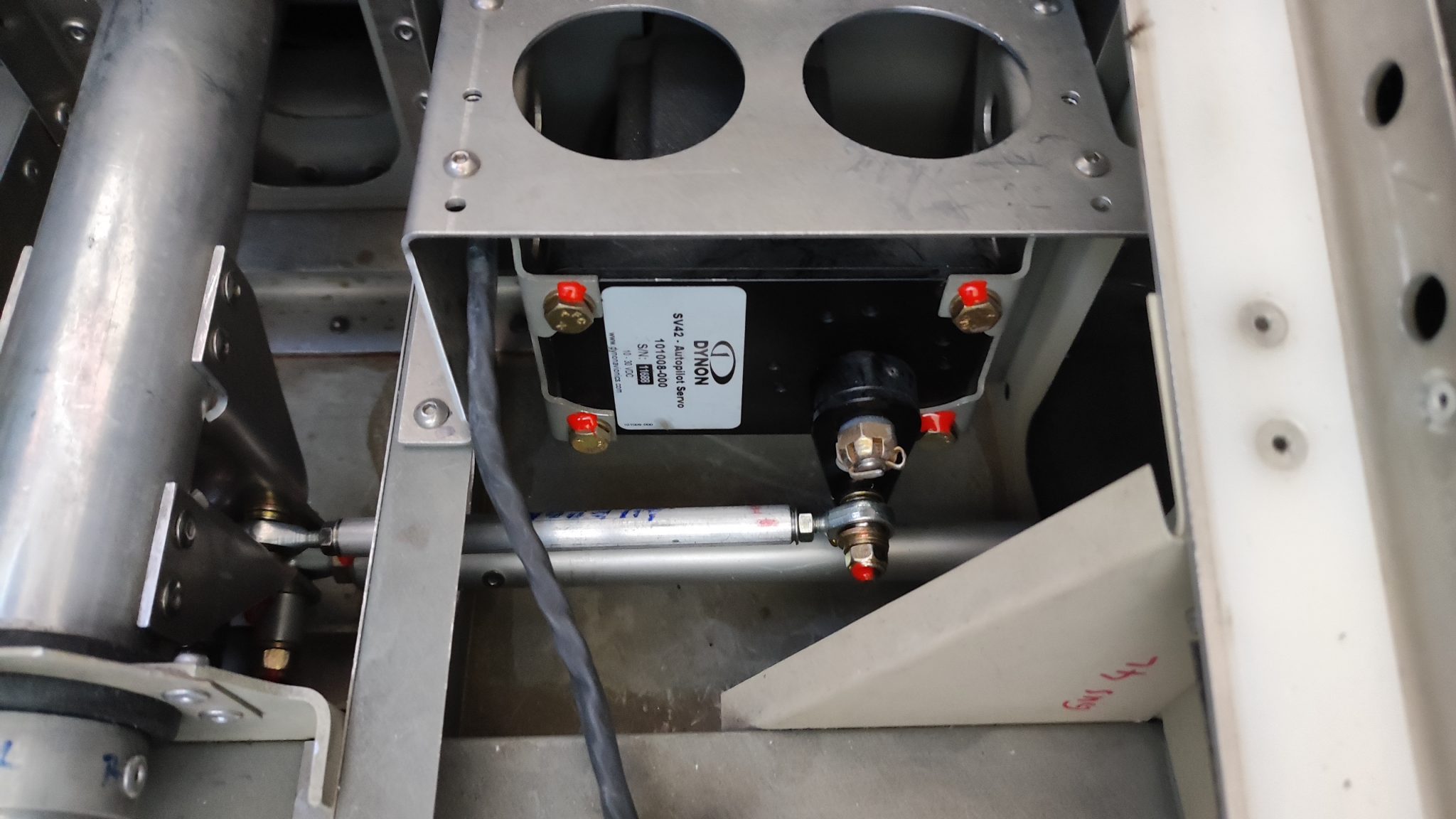
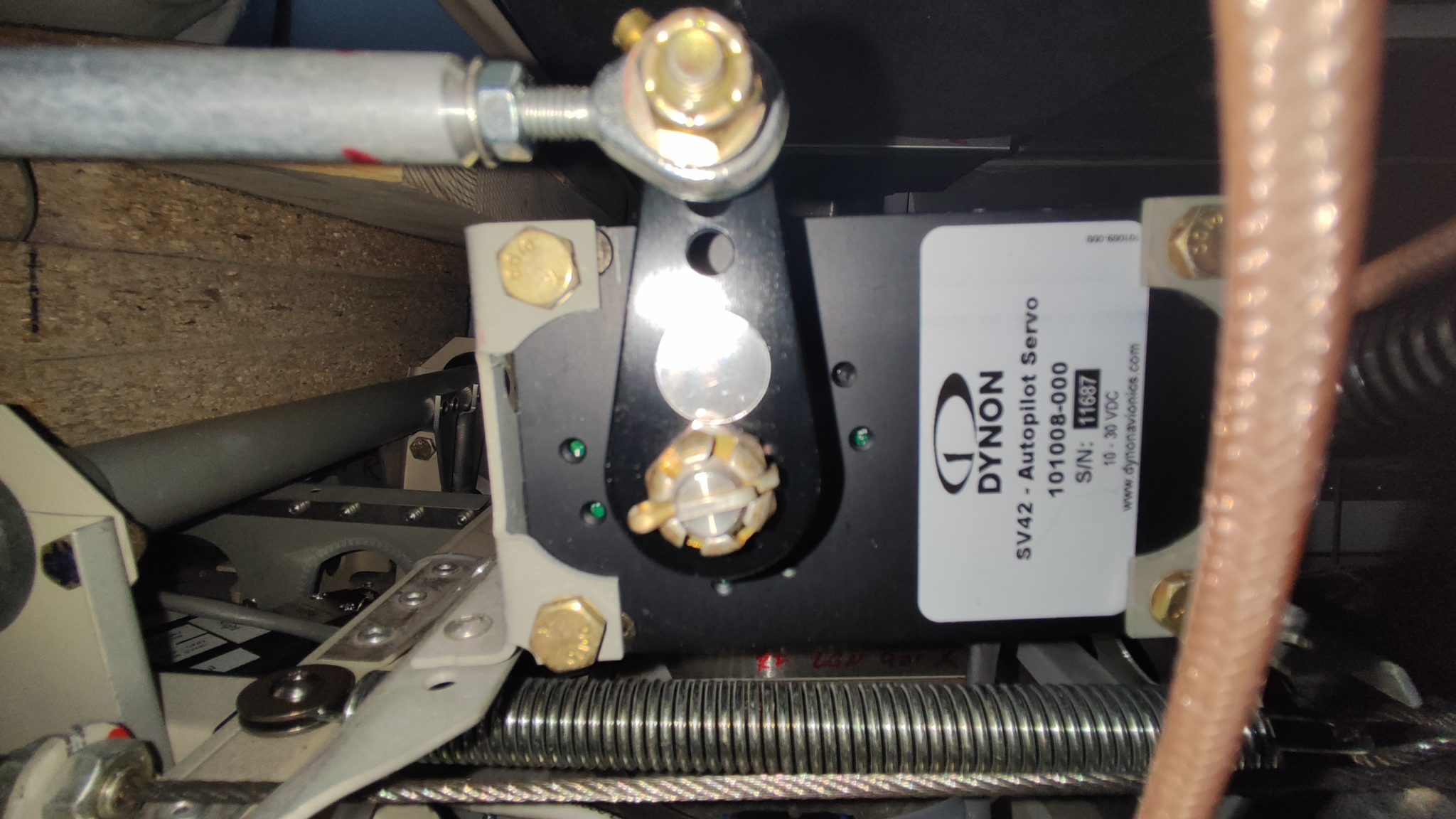
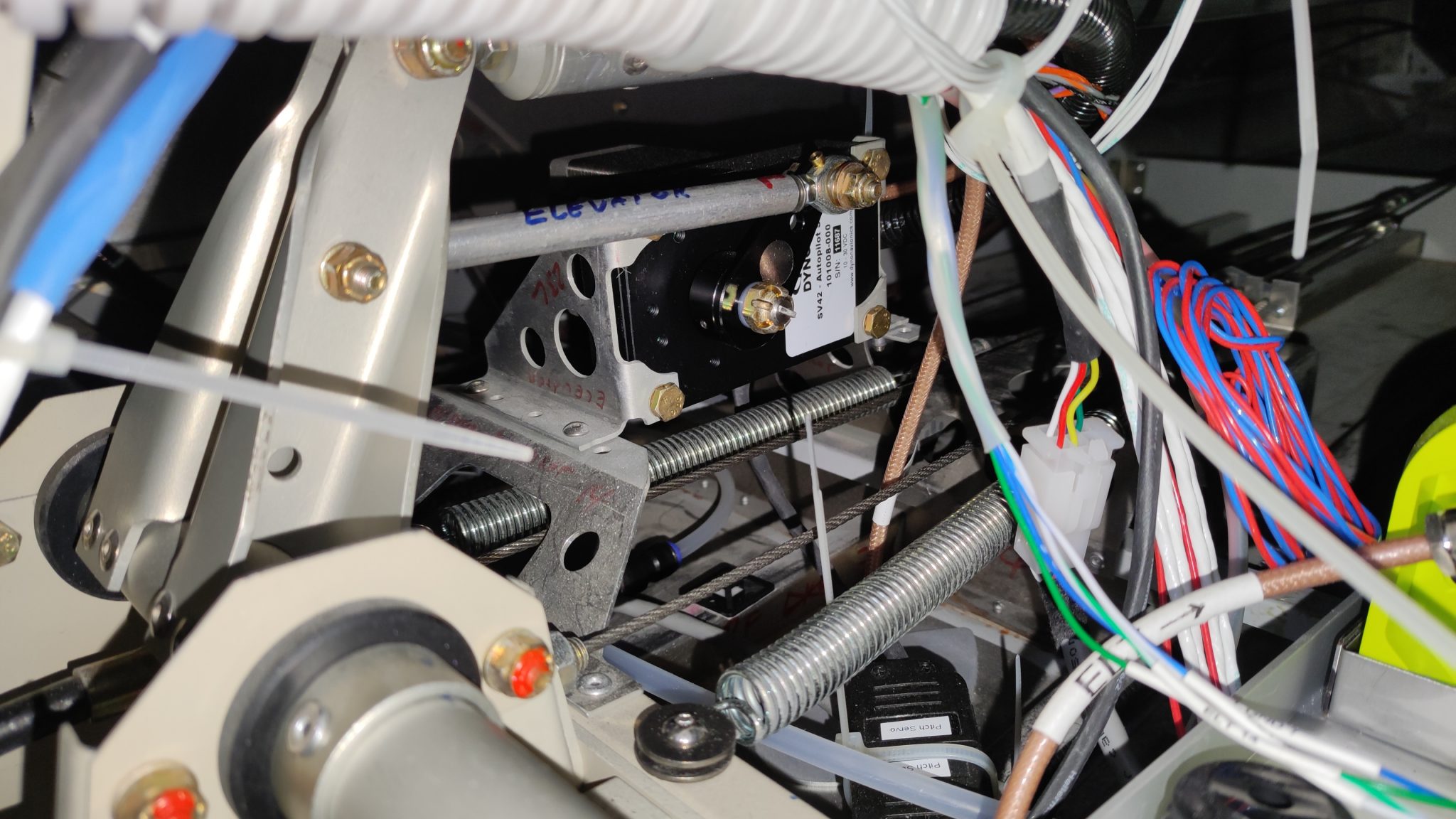
Jetzt habe ich die Pushrod für den Autopiloten Roll Servo eingebaut, justiert und gesichert. Die Justierung und das anbringen des Sicherungslacks am Pitch Servo habe ich auch heute erledigt.
Danach habe ich die HDXe upgedated, den XPNDR Hex Code eingegeben und Easy VFR Daten geladen.
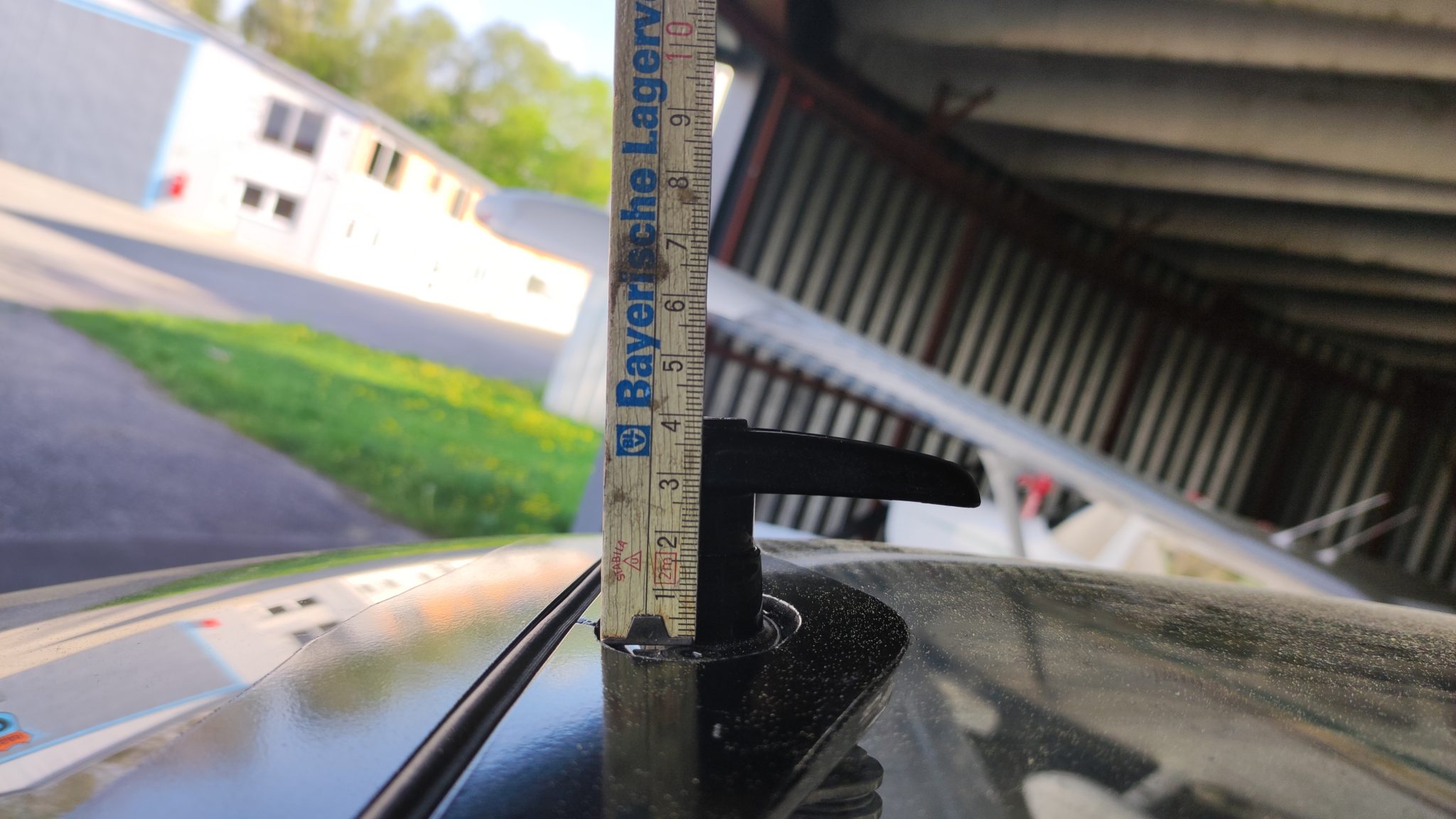
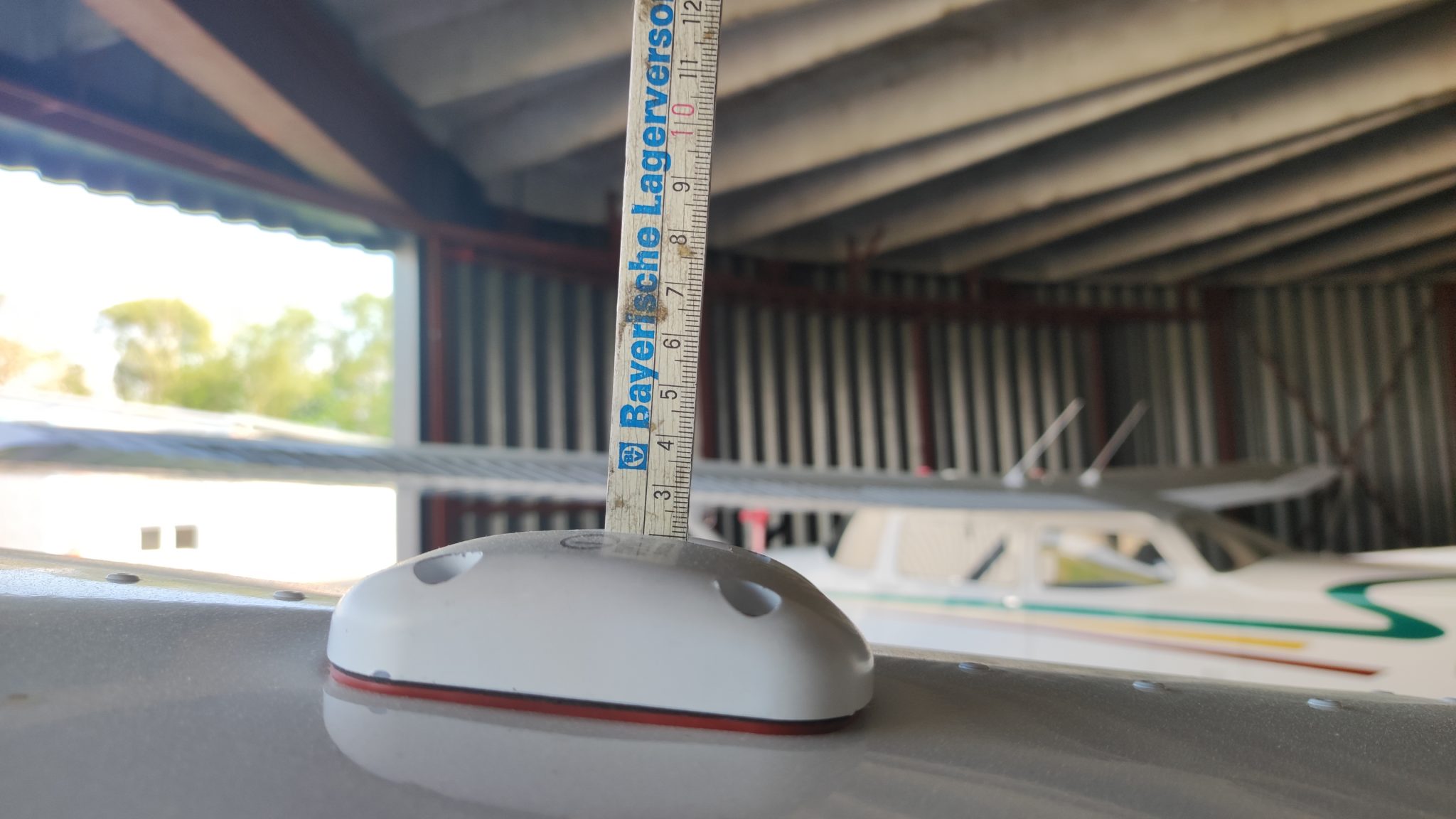
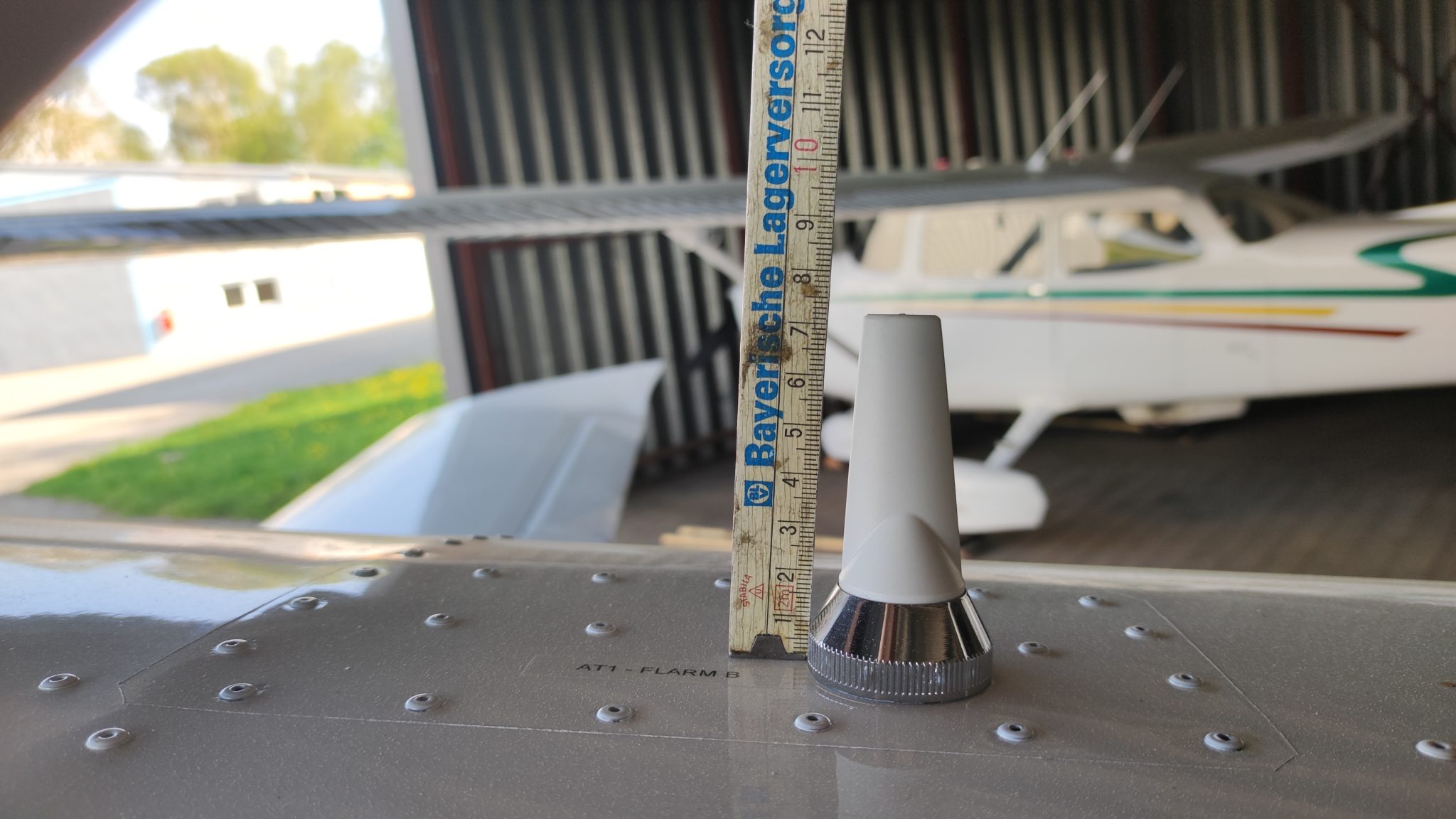
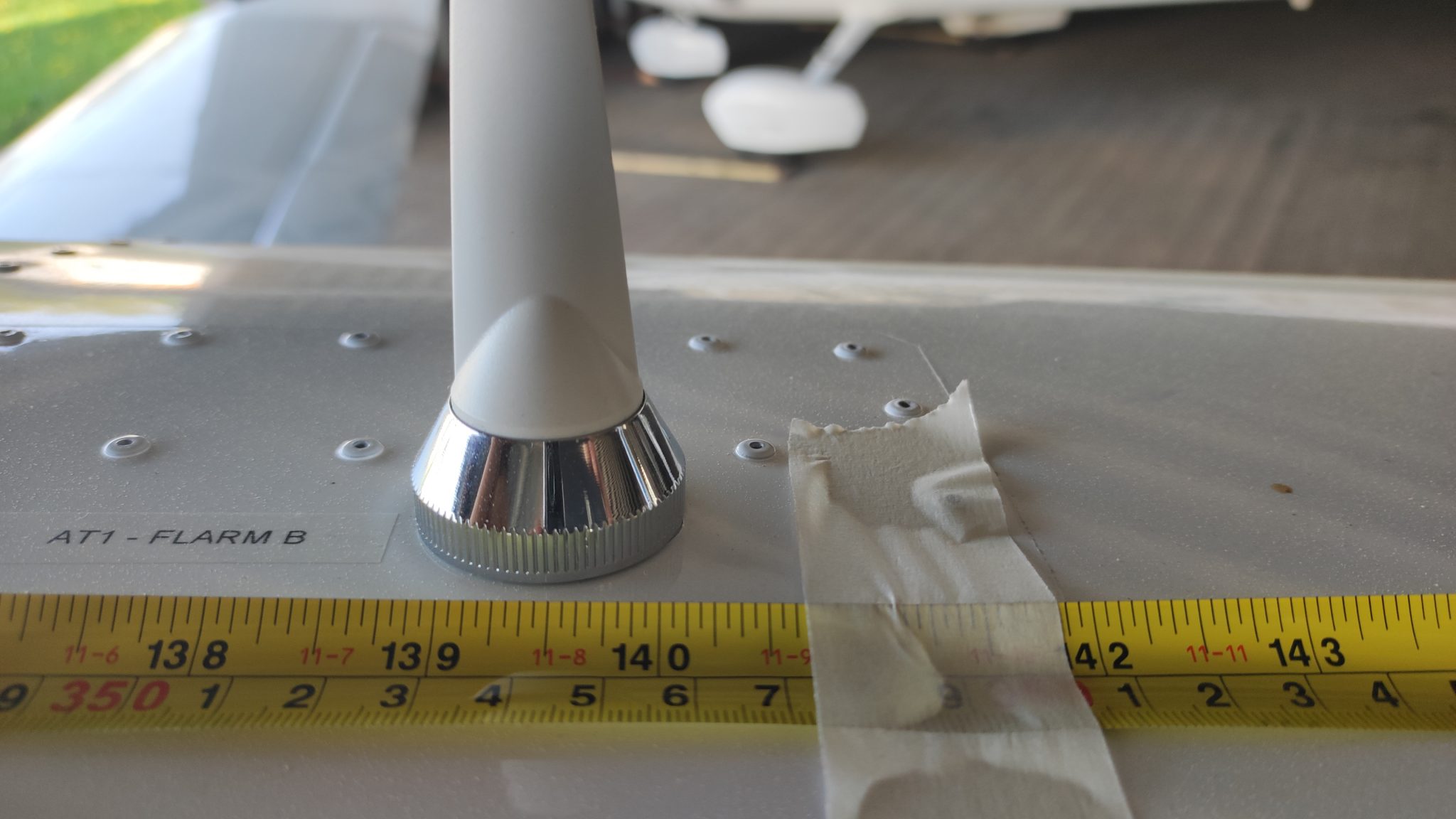
Des weiteren habe ich die Maße genommen, um sie an Clouddancers schicken zu können, die mir den Pyjama anfertigen.
Das Fuel Pumpen Assy liegt im KofferraumAutopiloten Pushrod für Roll Servo justiert und mit Sicherungslack versehendie Kontrolle des rechten Winkels bei der Pitch Servo PushrodHDX Firmware auf 16.2.4 upgedatedAbmessen für die Abdeckung von Clouddancersdas Maßband reicht bis hintender Canopy Griff ist 40 mm hochund liegt zwischen 179 und 182 cm von der Cowling ausdie GPSe sind 20 mm hochund liegen zwischen 315,5 und 326 cmdie FLARM Antenne ist 70 mm hochund liegt zwischen 352,5 und 356die COM Antenne liegt zwischen 393,5 und 404 cm
Das rechte Kabel ging genauso schwer in das Leerrohr wie das linke. Leider sind mir die Schrumpfschlauch Bänder ausgegangen, die ich zur Beschriftung der Drähte bisher verwandt habe. Mit „Fähnchen“ habe ich eine behelfsmäßige Lösung gefunden. Wenn die bestellten Bänder ankommen, werde ich die Fähnchen wieder durch Schrumpfschlauch ersetzten. Das Armaturenbrett habe ich jetzt wieder eingebaut und danach die HDXe.
Danach habe ich noch die Pushrod für den Autopiloten Pitch Servo eingesetzt aber noch nicht justiert.
die rechten Kabel sind jetzt auch soweit fertigArmaturenbrett und HDXe wieder eingebautAutopilot Pushrod für Pitch Servo eingesetzt
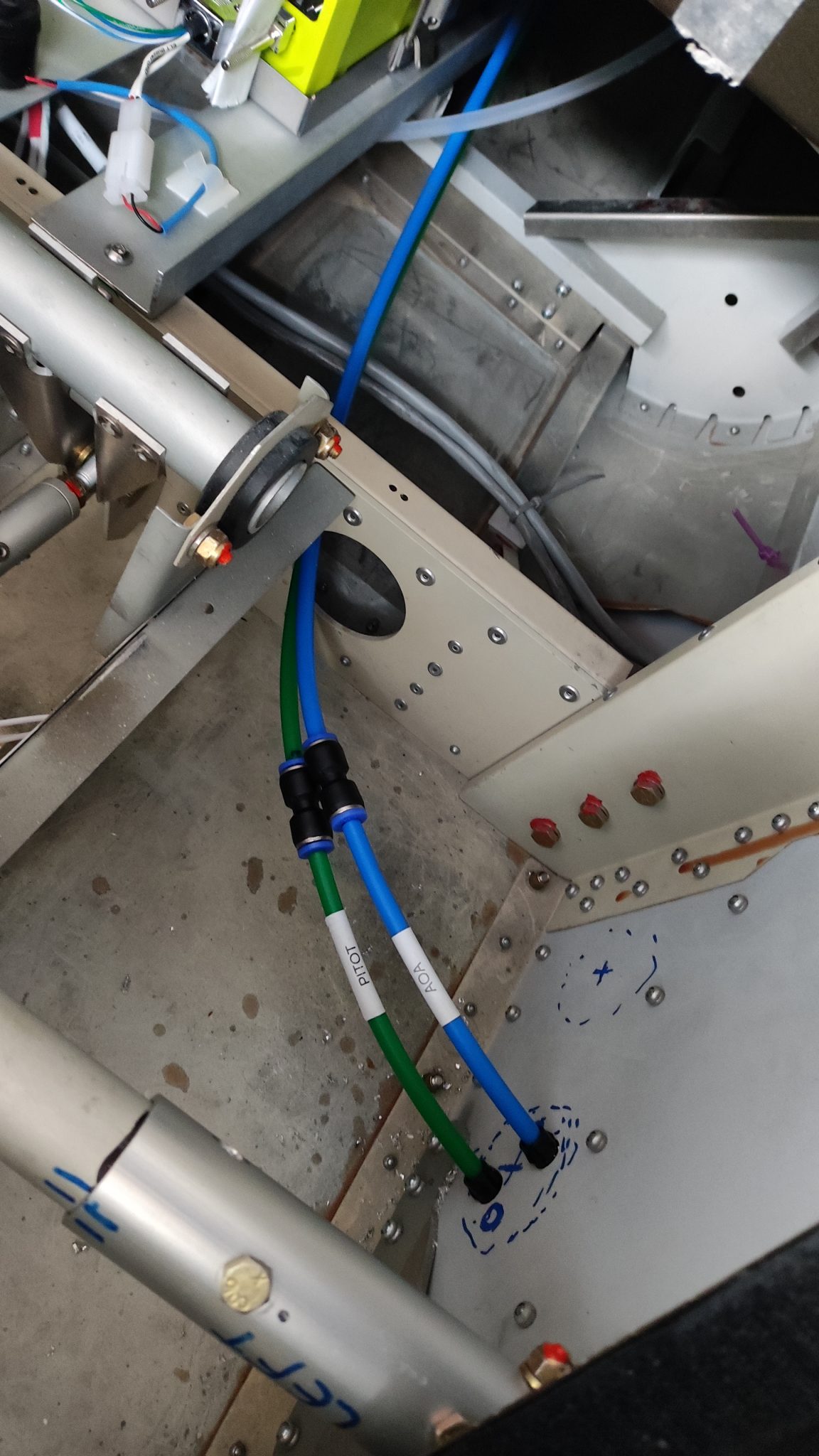
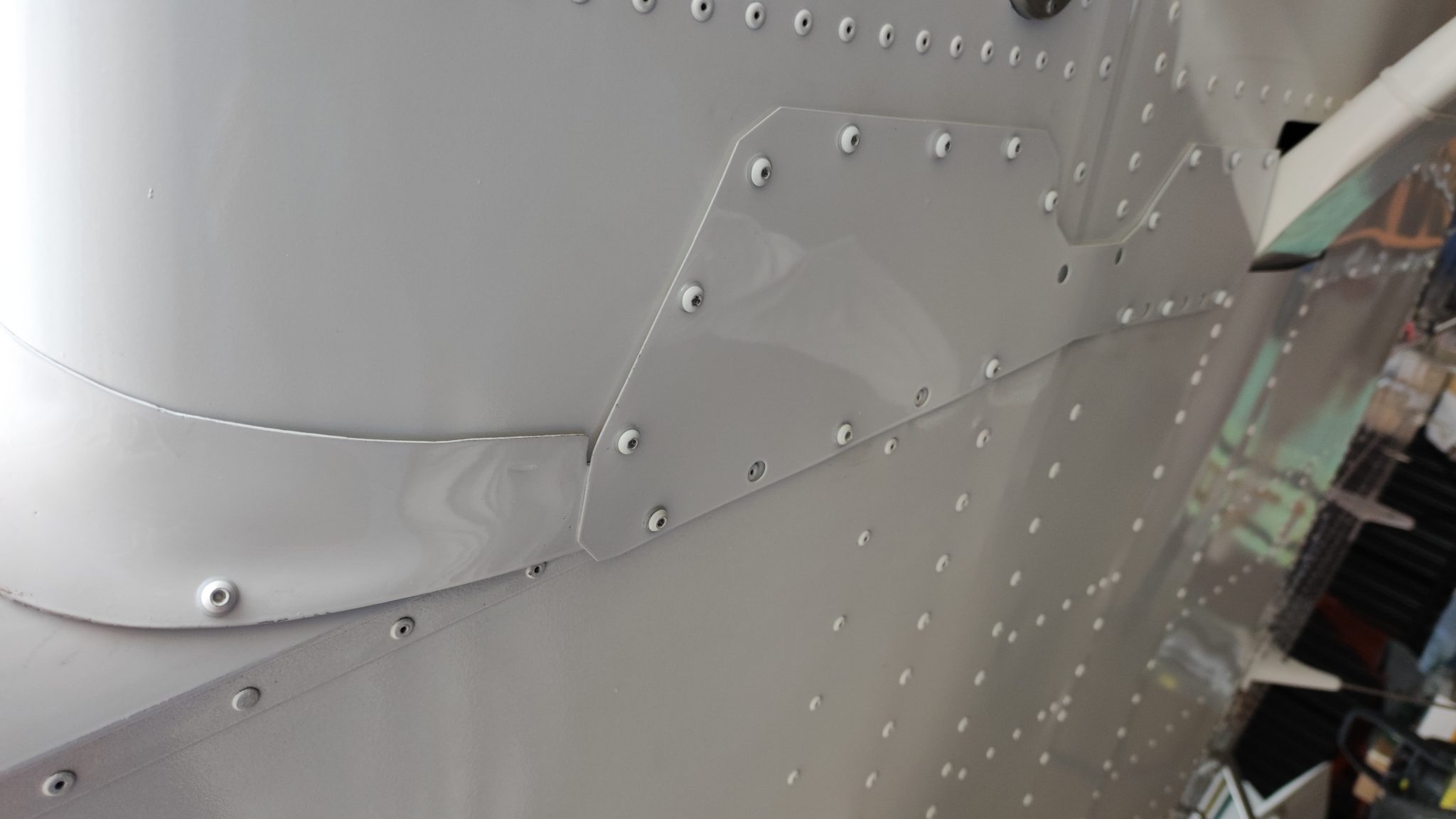
Gestern sind die Kabel-Kappen angekommen. Deshalb habe ich sie zuerst eingebaut um die Fuel Verbindung ebenso einbauen zu können. Das ging recht flott. Um etwas Ordnung in der Fuselage zu bekommen, habe ich die Pneumatik Leitungen für AOA, Pitot und Static zusammengeführt. Die endgültige Befestigung habe ich noch nicht gemacht. Vielleicht muss bei der Prüfung noch etwas verändert werden. Jetzt habe ich die Wing Fairings angebaut. Hierfür musste ich zuerst die Rivnuts setzten. Ich habe mich an die Maße von TAF gehalten, wie ich die Bohrungen in die Fairings gebohrt hatte. Leider stimmt eine Bohrung auf beiden Seiten nicht. Sie trifft auf den Rand einer Niete. Ich musste ein neues Loch bohren. Die beiden nicht passenden habe ich mit Folie überklebt. Das ist aber kein Beinbruch. Ich muss feststellen, dass ich wohl etwas zu geizig mit dem Lack war, als ich die Fairings lackiert habe. Das Weiß ist etwas zu dunkel, weil durch die zu dünne Lackschicht die graue Grundierung durchscheint. Ich muss die Fairings bei Gelegenheit also sowieso nochmals lackieren. Da kann ich die beiden Löcher wieder zuspachteln. Links konnte ich auch die Under Wing Cover anschrauben. Für die rechte Seite hatte ich zu wenig Schrauben. Auf der Heimfahrt habe ich mir welche besorgt.
linke Fuelverbindung ist festAOA und Pitot sind mit ADHARS verbundenauch die Static Linemit dem Winkelbohrer ging das gut an den engen Stellendas Resultat vorneder hintere Parthinten von untenFairing und Under Wing Coverweiter hinten